机器人智能应该住在哪里
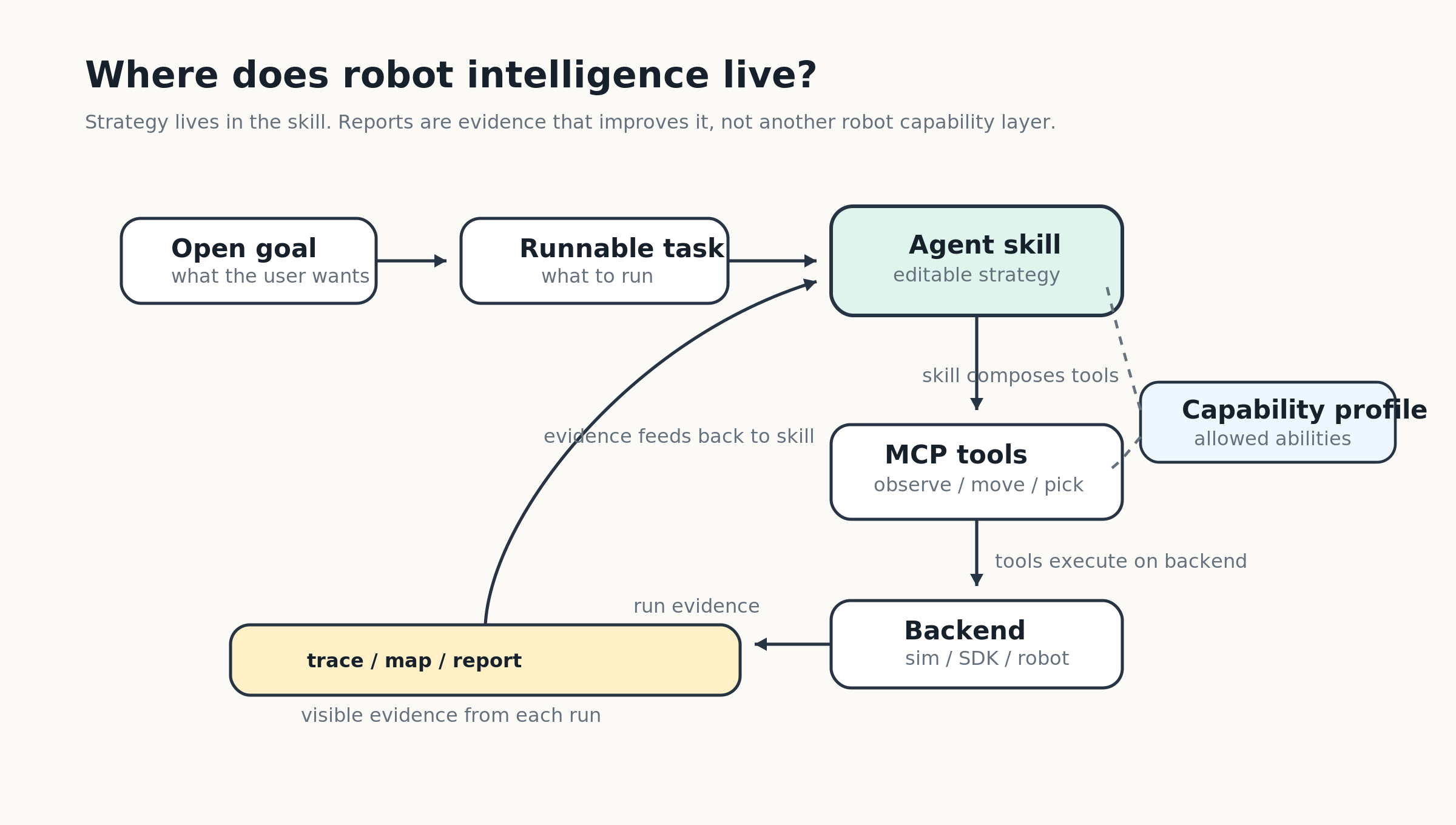
策略住在 Skill,能力边界住在 MCP,运行证据反过来喂给 Skill。Report 不是外围工程,而是让大脑变聪明的反馈层
open-ended goal
→ runnable task
→ agent skill
→ bounded MCP capability tools
→ simulator / real-robot backend
→ trace / runtime map / report
→ skill improvement
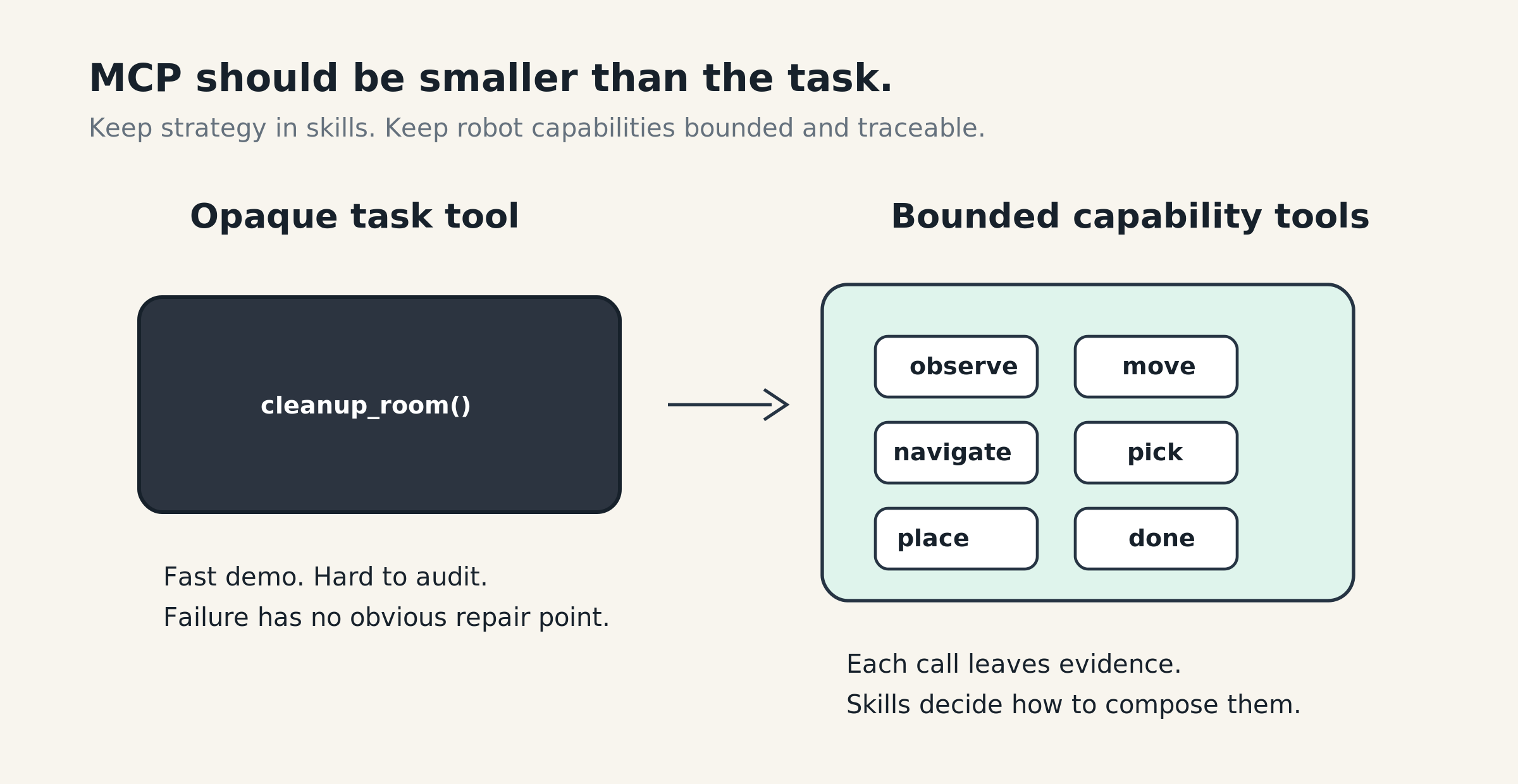
MCP 不能吞掉整个任务
暴露一个 cleanup_room(),demo 会很快,但智能被藏起来。Roboclaws 让 Skill 负责策略,让 MCP 保持稳定、受控、可审计的机器人能力边界
bad smell
opaque task tool
失败没有明显修复点,人也看不到中间发生了什么
contract
bounded capabilities
observe / navigate / pick / place / done,每次调用都留下证据
每次 serious run
都要留下能复盘的结构化证据
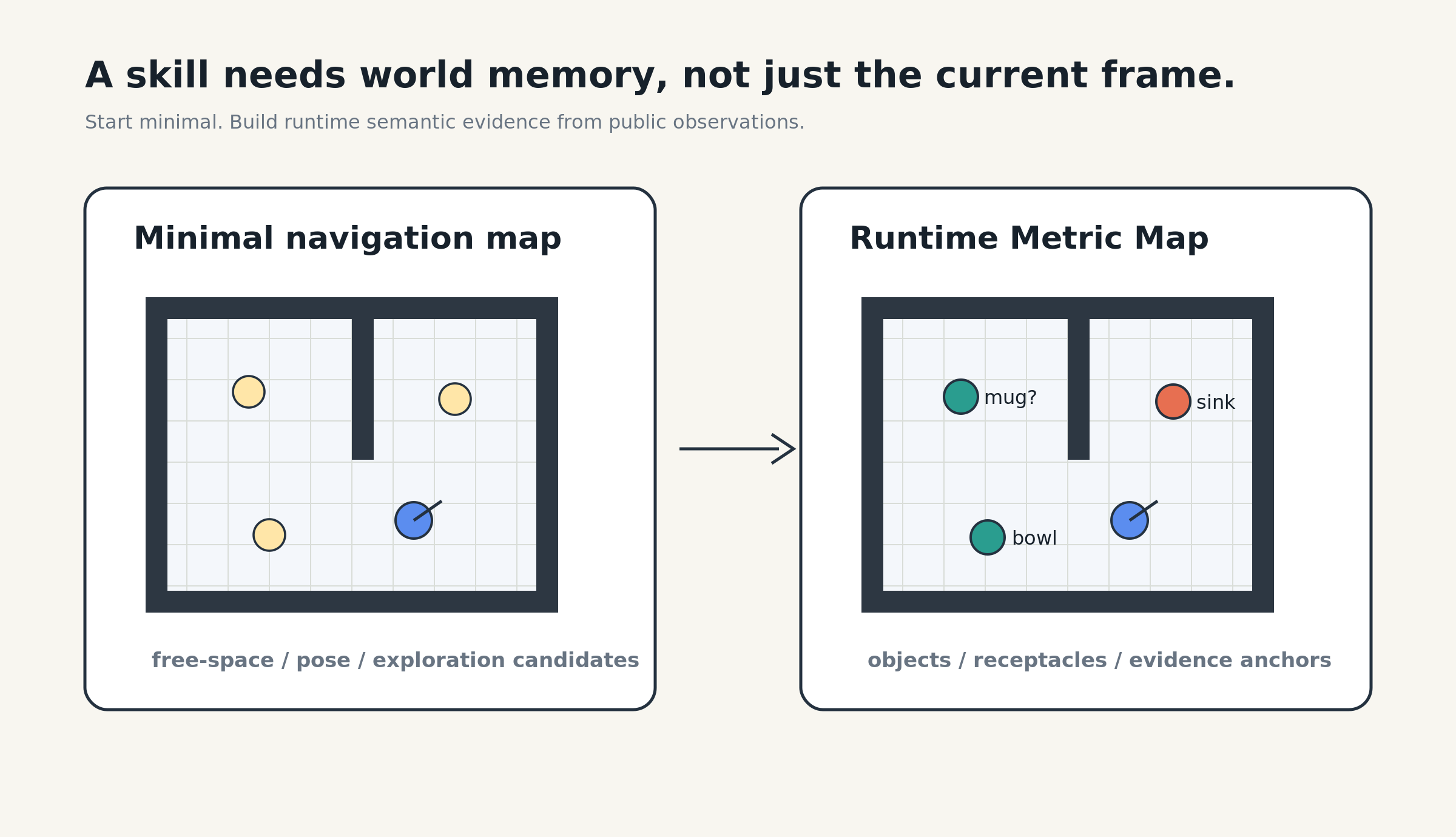
Runtime map 是 Agent 的世界记忆。它把公共观察、物体候选和证据锚点从“当前帧”提升成可复查的任务状态
trace
tool calls / decisions / failure points
map
runtime_metric_map.json · world memory
view
agent_view.json · agent-facing evidence
report
before / after images · score · HTML review
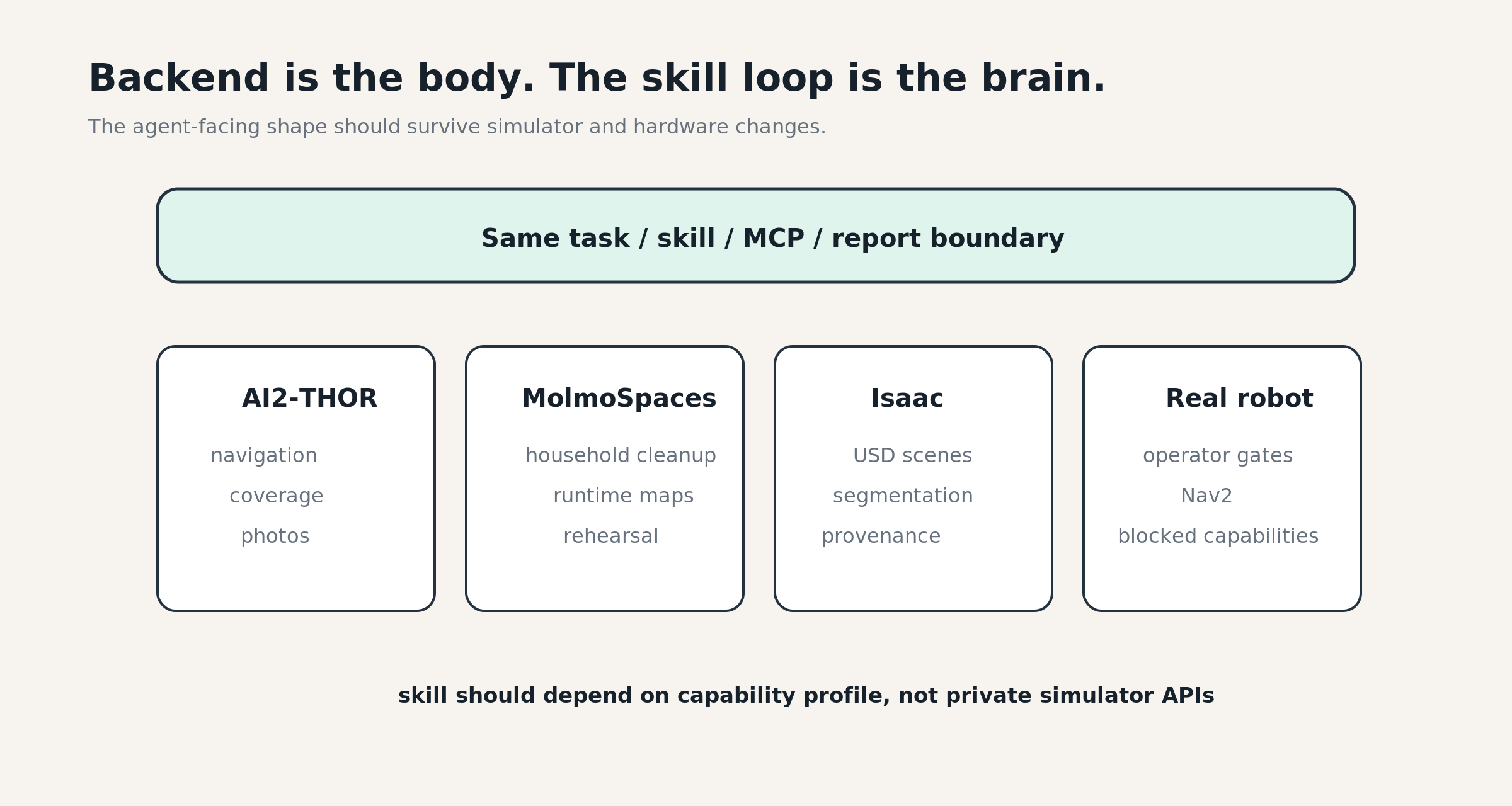
Backend 是身体
Skill Loop 才是大脑
同一套 task / skill / tool / report 边界不绑定单一仿真。Agent 不应该直接学习私有 simulator API,而应该依赖 capability profile
simulation
AI2-THOR / MolmoSpaces / Isaac
导航、拍照、家庭清洁、USD scene、camera 和 segmentation evidence
robot
Nav2 / Agibot G2
真实机器人导航、感知和后续 manipulation 能力按证据分层标注
Household cleanup
从单次 demo 到可审查报告
5/5
semantic accepted
cleanup run
1.0
sweep coverage
full sweep
split
private eval
Agent 输入 / 评估证据分离
27
semantic substeps
可逐步复盘
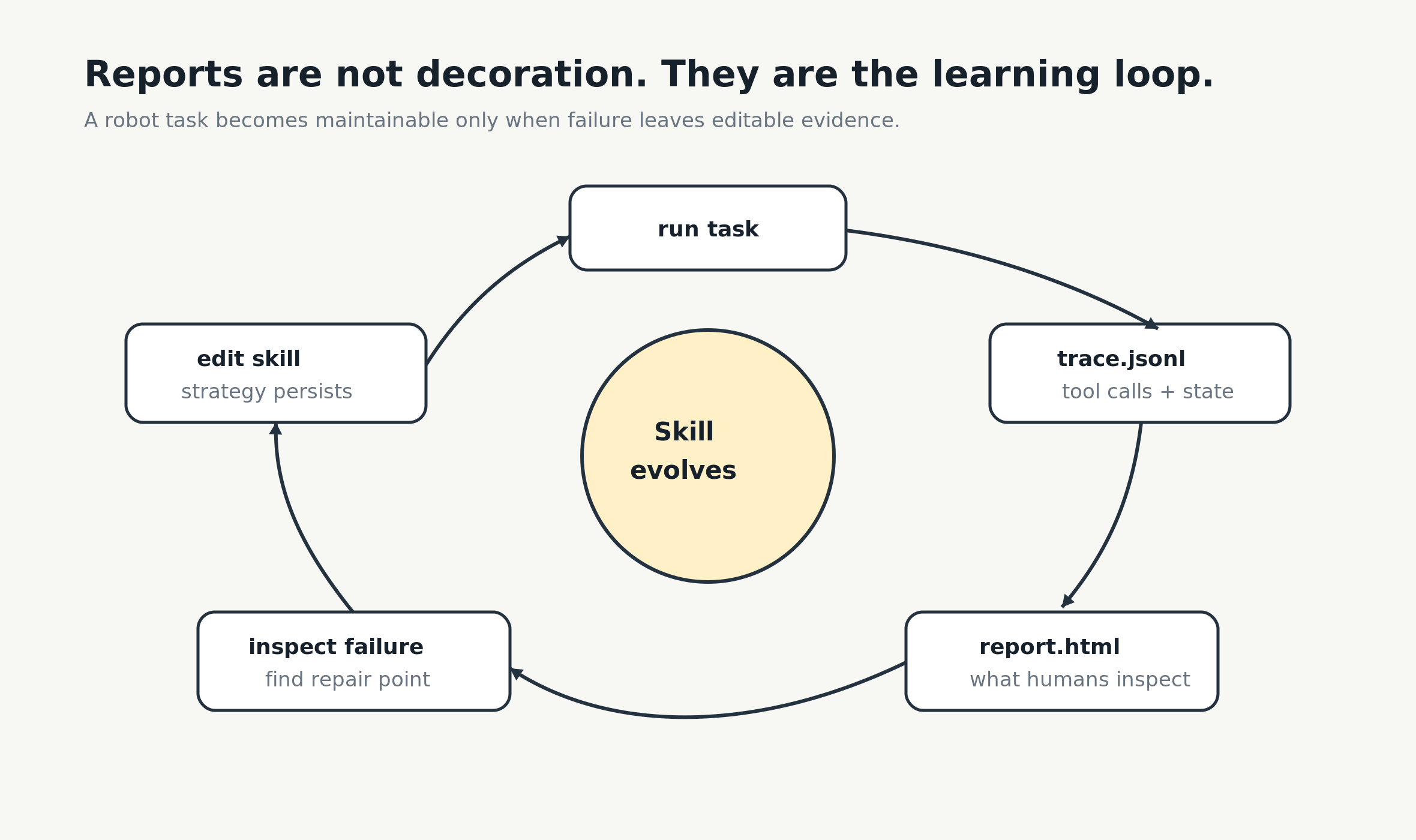
Report 和 harness
不是外围工程
机器人系统最危险的地方,不是失败,而是假装成功。没有 trace,Coding Agent 不知道哪里失败;没有 report,人类不知道结果能不能相信
Brain 不是模型,是 run → trace → report → edit skill → rerun → compare 的循环