汽车人 AI 进化论 · 第 09 期
从 Ultrathink Goal
AI Coding 工程化的一年
缪东旭 MiaoDX
prelude · proof of work
这不是旁观者视角
公司内部 project、自己的开源项目、CI、OpenClaw,都在真实消耗这些模型,长程任务也已经开始交给 agent 跑
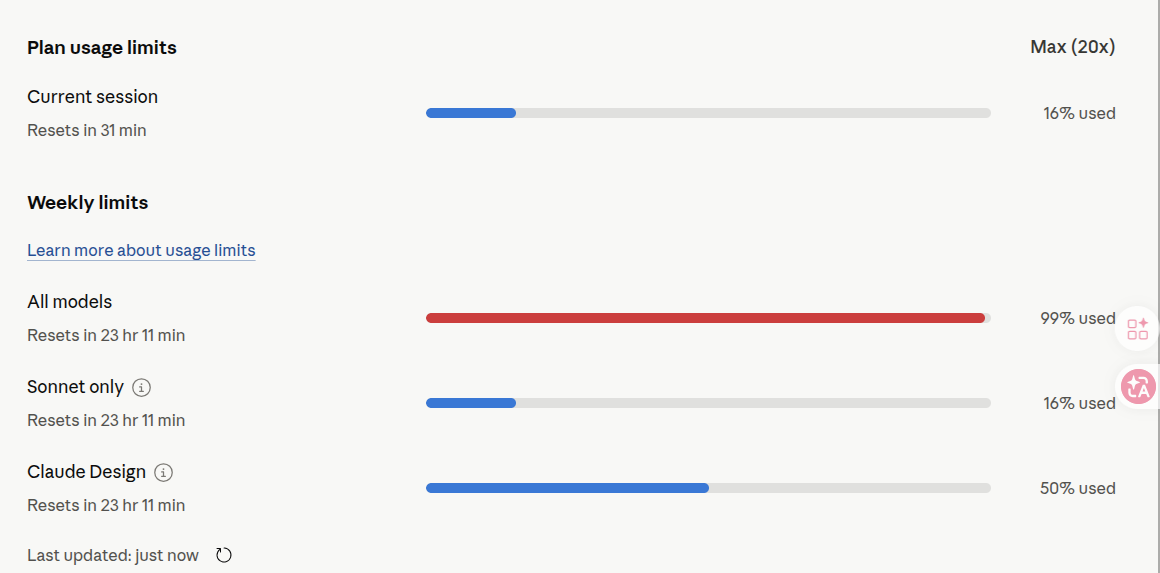
claude code
主力长 session
Max 20x / all models 接近打满,很多 lecture 和项目改动都从这里起步
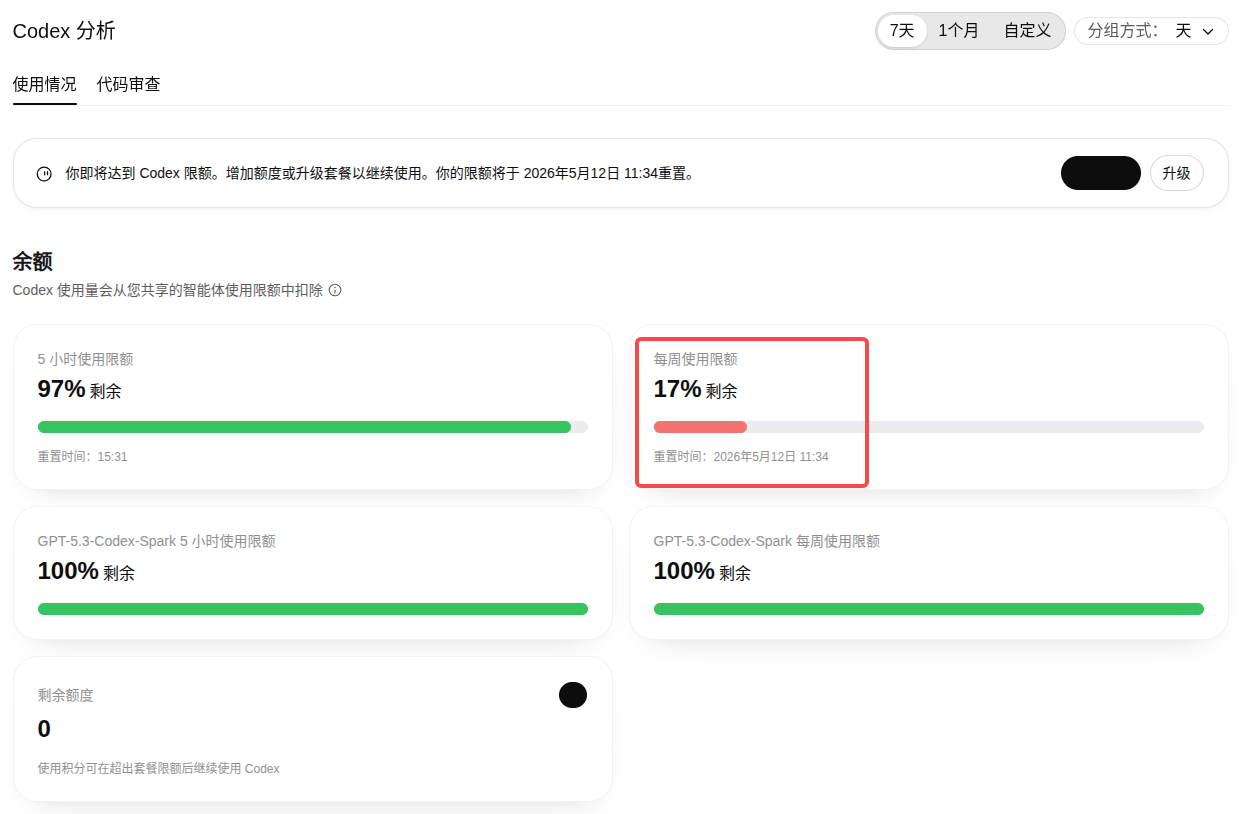
codex
/goal、review、CI
不是只做 demo,而是在真实 repo 里让 Codex 扛住目标、检查和收尾
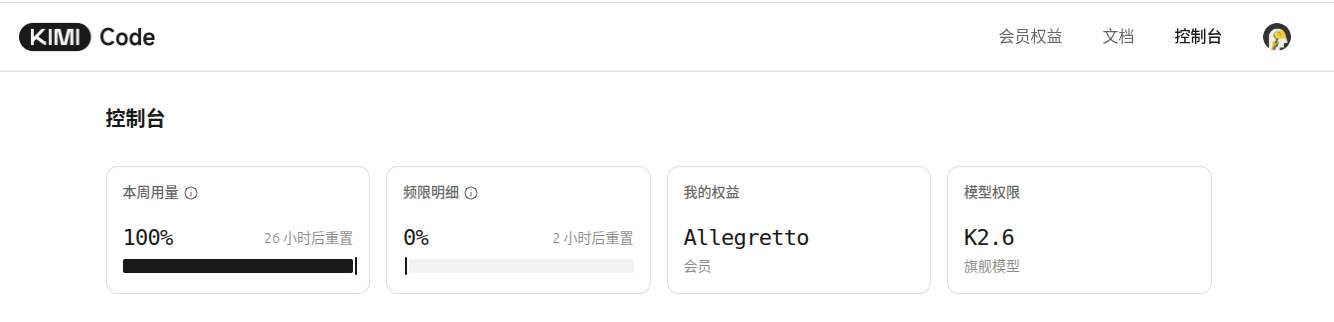
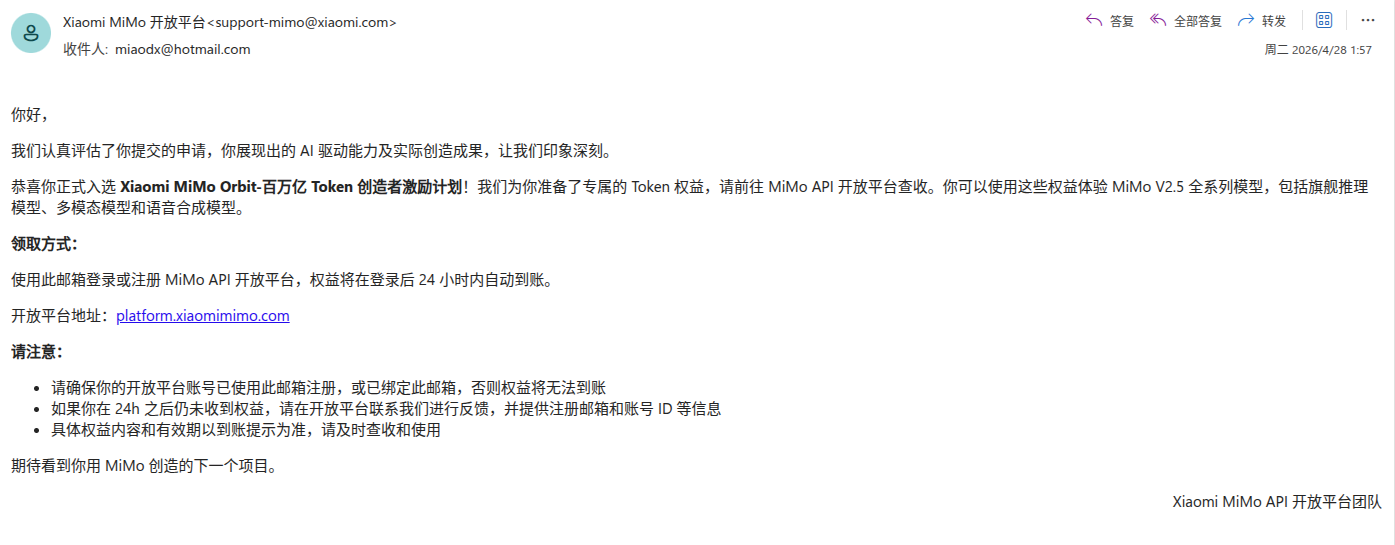
kimi / mimo
国产与私有模型池
内部 only 项目不一定能用 SaaS frontier model,但仍然要尽量用能用到的最好模型
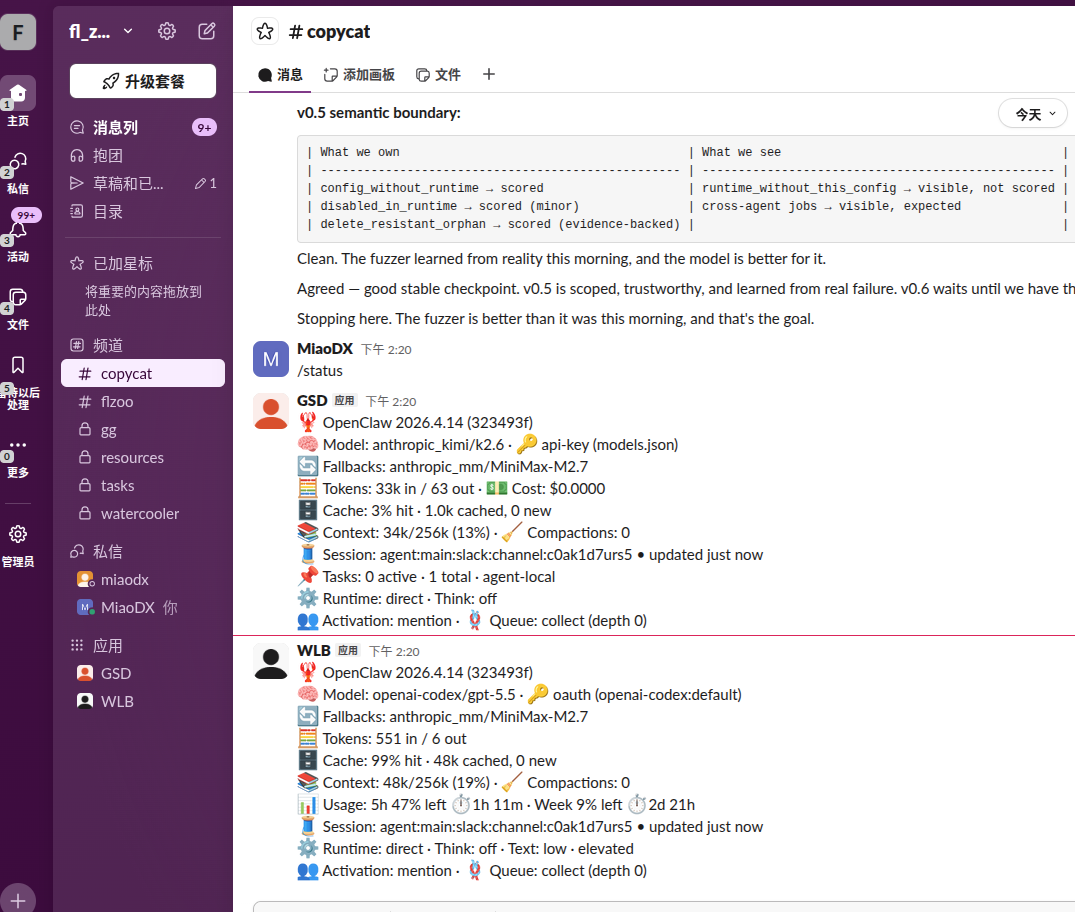
openclaw
Slack 里的 agent 工程
GSD / WLB / 状态汇报不是孤立技巧,而是协作入口的一部分
open source
开源项目持续迭代
自己的工具链、deck、实验项目都在持续被 agent 辅助 refactor
long run
/goal + intuitive-flow
展示的是目标命令加自建 skill 可以承接真正的长程任务
这页不要讲太久。目的不是炫耀 token,而是建立资格:内部项目、开源、CI、OpenClaw、长程任务都在跑,后面的判断来自真实消耗和踩坑。
§ 0
# Karpathy 的困境开场。给观众扔一个困境:Karpathy 一边说自己每天都在 manifest,一边又说自己从没这么跟不上。今天不把它讲成情绪,而是讲成工程问题:如果一切都是 skill issue,那 skill 的边界是谁在推?
section/0 · 双证据
同一个人,两个信号
No Priors · manifest
Code's not even the right verb anymore.
I have to
express my will to my agents for 16 hours a day.
Manifest.
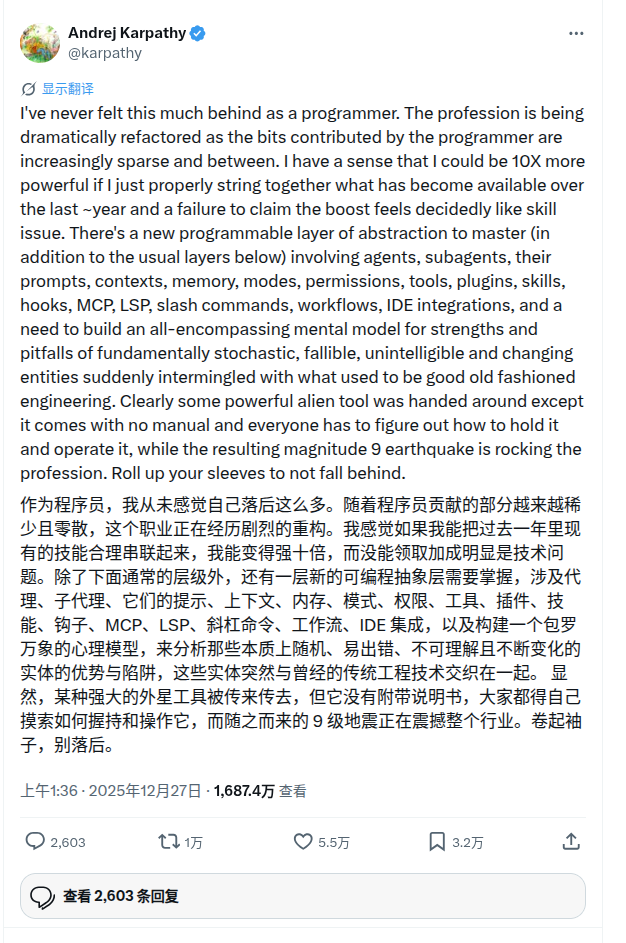
X post · behind
I've never felt this much behind as a programmer.
The profession is being dramatically refactored.
动词改了。Karpathy 没说"写代码",说的是 manifest——把意图具现化给 agent。不是写代码,而是召唤/驱动一组 agent 去执行意图。另一边,他又说自己从没这么跟不上。今天就解释这个困境:工具越强,人越容易变成系统瓶颈。
section/0 · AI psychosis
AI psychosis 在工程里长什么样
this is why it gets to the psychosis is that this is like
infinite and everything is skill issue.
best practice drift
最佳实践追不上,昨天刚学会的 workflow 今天就被产品内建或废掉
infinite budget feeling
token 似乎用不完,任务总还能继续 refactor、继续 polish、继续开分支
moving tools
MCP、skills、subagents、/goal、Claude Routines 快速变化,手册永远慢半拍
exit problem
最难的不是生成,而是决定什么时候算完成、谁有资格说完成
不要让人继续卡在系统瓶颈 的位置
不要把 AI psychosis 当医学词展开。这里讲的是工程体感:生成成本接近零以后,事情没有自然停止点。我们可以继续让它查、继续让它改、继续让它验证。于是真正的问题变成:谁定义行动入口,谁控制信息入口,谁给退出条件。
§ 0.5
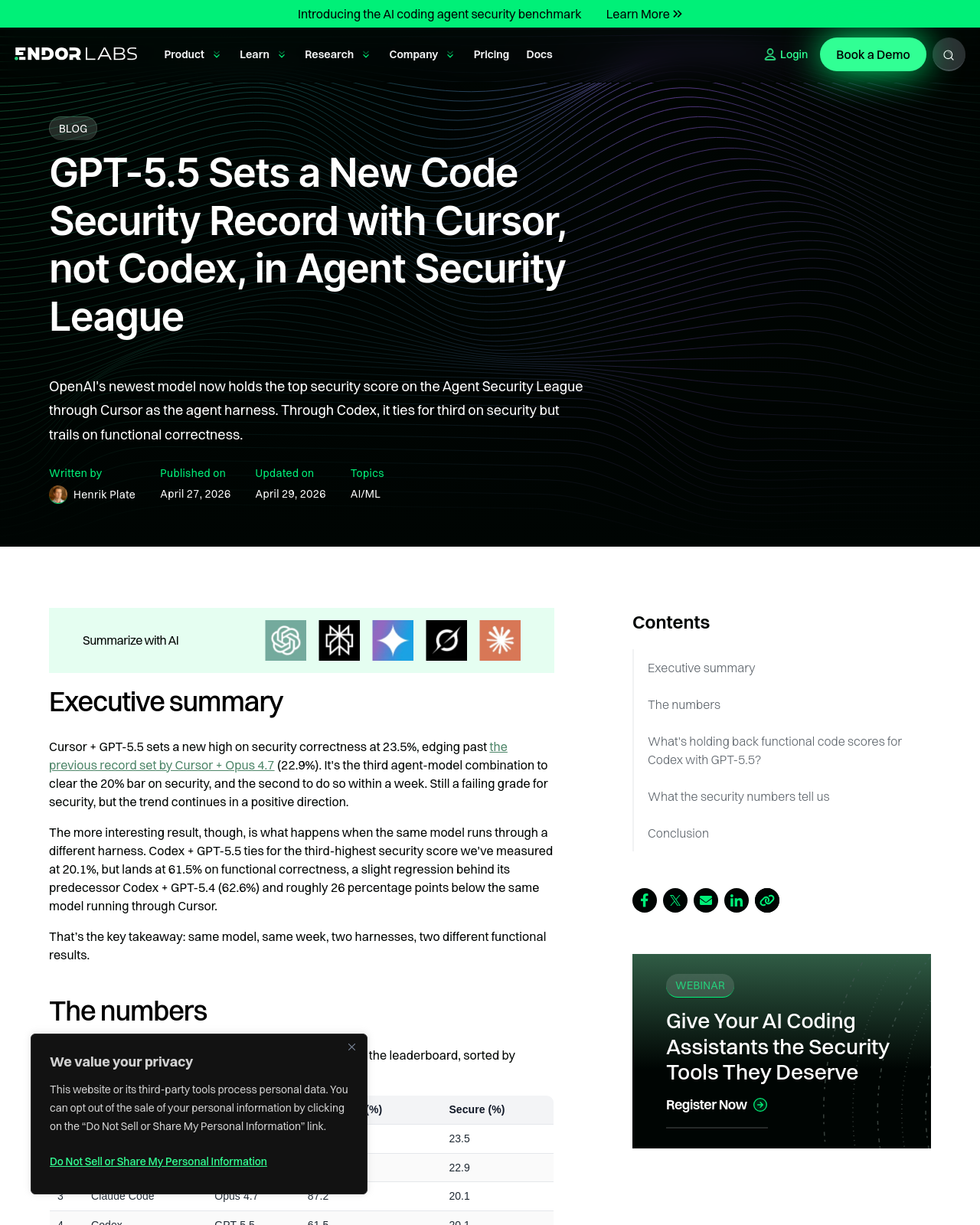
25.7pp
一个夸张的差距 —— 同模型,只是换了个 harness
今晚固定用法:harness = 模型外面那一圈工程边界:工具、上下文、权限、流程、验证机制
实证立柱。Karpathy 的 psychosis 不是孤立感受,是有数据的。这一节就拍出三组实证:25.7pp / 6× / 81.8%。这页只放 25.7pp,留个钩子,下一页才出全图。
section/0.5 · 数据立柱
25.7pp
same model · different harness
GPT-5.5 在 Cursor 87.2% vs Codex 61.5%
6×
cited across studies
Meta-Harness 论文 cite [46] 的跨研究发现27.5% → 37.6%
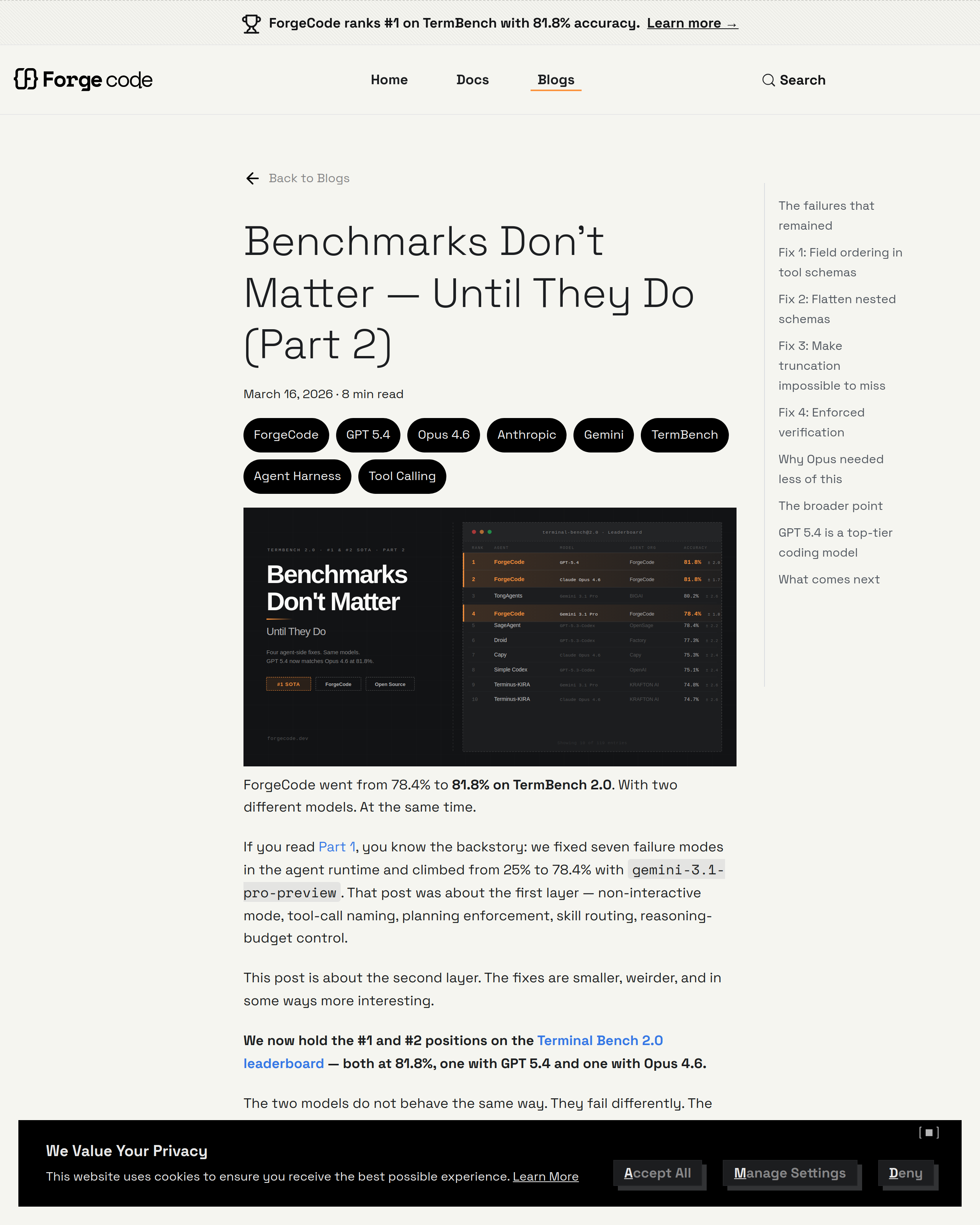
81.8%
different models · same harness
GPT-5.4 + Opus 4.6 在同一 harness 下都跑到同分
为什么同一个模型差这么多?因为 agent 只能调它能调的工具、看它能看到的上下文、在它被允许的验证机制里宣布完成
把三个数据点串起来念:同一个模型不同 harness 差 25 个百分点(Endor 真实 benchmark);同 benchmark 跨研究有 6× 差距(Meta-Harness 论文 cite,不是它自己的实验数字 — 它自己的贡献是 27.5%→37.6%);同 harness 让不同模型收敛到同分(ForgeCode 关键发现)。第三个最有意思 — 它说的是 harness 把不同模型的失败模式都 round 掉了。停一下,引到下页:今天不讲哪个模型最强,讲那 25 个百分点的工程化在哪里。
section/1 · 三轴入口
为什么从三件事讲
同一个模型,换一个 harness,表现可以完全不同,模型能力仍然重要,但 harness 决定能力怎么被转成可交付结果:行动面、信息面和退出条件
Skill
agent 能调什么?
对应行动入口 :工具、命令、skills、Claude Routines,决定 agent 能把意图落实到哪些动作上
Context
agent 看到了什么?
对应信息入口 :文件、历史、memory、subagent 隔离,决定模型靠什么作判断
Verification
谁判定完成?
对应 exit condition :rubric、grader、测试、proof pack,决定长程任务什么时候停止
这三件事能解释为什么同模型、不同 harness,会出现巨大的结果差异
提前给观众三轴。这里要把 model 和 harness 的关系讲准:模型能力当然重要,但 harness 决定能力怎样被转成可交付结果。Skill 不是能力泛称,而是行动入口。Context 不是越多越好,而是信息入口。Verification 是退出条件。后面的 405 个 npm publish timestamp,都用这三件事读。
section/1 · 主线
Claude Code 405 个版本 · latest 2.1.139 · 截至 2026-05-11 UTC
VIBE
0.2.x · 95 versions
SDD
1.0.x · 121 versions
HARNESS
2.x · 189 versions
ultrathink
0.2.44
auto compact
0.2.47
@import
0.2.107
plan mode
1.0.33
hooks
1.0.38
subagents
1.0.41
/todos
1.0.94
skills
2.0.20
subagents v2
2.0.30
routines
2.1.107 · 04-14
managed agents
2.1.132 · 05-06
latest + /goal
2.1.139 · 05-11 UTC
/goal · Codex 0.128
Claude 2.1.139
Skill
它能调什么?
terminal runtime、MCP/auth、plugins/hooks、agent loop 都在扩展行动入口
Context
它看到了什么?
@import、subagents、managed agents,把上下文从手工拼接变成产品状态
Verification
谁在判定完成?
/goal 开始把目标和完成条件做成一等入口
这页同时保留两层:先用上方时间线讲“怎么一路长到这里”,再用下方 release map 给“现在已经长什么样”的视觉证据。讲法:先念四段 Ultrathink → SDD → Harness → Goal。再看左侧五层:terminal runtime、MCP/auth、plugins/hooks、agent loop、/goal。右侧三问收束:它能调什么、看到了什么、谁在判定完成。OpenAI 和 Anthropic 都在做同样的事:Codex 0.128.0 把 agent loop 自身做进 slash command,Claude Code 2.1.139 把 task completion criteria 变成 /goal 入口。
§ 2
# Vibe 段0.2.x 时代 · Skill / Context / Verification 三个责任几乎全在人手里
section/2 · vibe
三个维度都由我们自己承担
SKILL
我们写 prompt
没有 skills,没有 MCP,prompt 就是工具调用的全部门面
CONTEXT
我们管上下文
auto compact (0.2.47) 是产品第一次帮一点忙,但仍然主要靠人剪
VERIFICATION
我们自己看输出
"先跑一下""手动改改"——人盯每一步
关键里程碑:ultrathink (0.2.44) 让模型多想一会,CLAUDE.md @import (0.2.107) 让上下文可以分文件、可以复用——但还是 prompt 风格,不是 skill / harness 风格
section/2 · vibe · 收束
这一段的核心体感
所有 prompt 都是一次性的 —— 一次没沉淀下来的任务约束,下一次还得重说
于是 0.2 时代社区里大家都在 hack —— 用 prompt 把后来的 SDD / 推理深度 / Context 雏形手工凑出来:
SDD 雏形
把 plan 写到文件
先让模型出 plan,写成 docs/plan.md 再让它照着实现 —— 把 plan 模式手工模拟出来
推理深度雏形
一直加 "ultrathink"
每个 prompt 末尾加 "ultrathink" 触发深度推理 —— 后来才被产品化进 /effort 命令
CONTEXT 雏形
@import + prompt 模板
CLAUDE.md @import 拼上下文,社区分享 prompt template —— 自己当 skill / context 的存储层
这一段最深的体感是:vibe 段我们自己在补后来会被产品内建的机制。Plan 没产品支持,就把 plan 写成 markdown 文件让 Claude 照做。Ultrathink 当时是隐藏关键词,没有 /effort 命令,每次都要手动加。Skill 没有产品形态,社区就互相分享 prompt template。这几件事 1.0.x 之后被产品化 —— plan 变成 plan mode,ultrathink 变成 /effort,prompt template 变成 skills。今天回头看,我们当时干的就是后来的 SDD / reasoning effort / Skill / Context 雏形。
§ 3
# SDD 段1.0.x 时代 · 意图开始从对话里搬出来,变成 spec / plan / todos / state 这些 durable artifacts
section/3 · sdd · 关键转折
durable artifacts 开始成为 agent 接口Plan mode 只是其中一个入口,真正的变化是把原来藏在对话里的意图、约束和完成标准,搬到 agent 可以反复读取和更新的对象里
SPEC
做什么 / 为什么 / 约束
需求、边界、non-goals、acceptance criteria 不再只靠口头 prompt 临场解释
PLAN
怎么做 / 顺序 / 风险
把执行路径写成可以 review、暂停、恢复和修正的结构
TODOS / STATE
现在到哪 / 下一步是什么
长任务从“聊着聊着推进”变成显式状态机,减少迷路和假完成
CONTEXT
哪些信息应该长期存在
CLAUDE.md / AGENTS.md / progress file 让约束从 transcript 噪音里沉淀出来
这一段的关键词:prompt-driven → artifact-driven
这里纠偏:先讲 artifact,再讲 Plan mode。Plan 只是最容易被产品做成按钮的 artifact。真正的变化是 intent、约束、步骤、状态和验收标准开始外部化,agent 可以反复读取、更新和交接。
section/3 · sdd · 产品化
产品开始承认这些 artifact 是一等对象
这些 feature 单看像小更新,合在一起是在给 spec、workflow、state、context 留位置
1.0.33
Plan mode
把 plan 从“prompt 里求它先想”变成显式 mode 和可审查 artifact
1.0.38
Hooks
把流程边界和自动检查接到执行链上,靠机制补强文档
1.0.41
Subagent 雏形
开始把子任务放进隔离 context,而不是让所有信息挤在同一段 transcript
1.0.94
/todos
把执行进度和下一步变成产品可见状态,而不是靠人记着
这页仍然保留 1.0.x 的 release 节点,但口径改掉:不是“大家都认可 plan”,而是产品开始承认 artifact 是 coding agent 的关键接口。Plan、hooks、subagent、todos 分别对应计划、流程边界、上下文隔离和执行状态。
section/3 · sdd · 社区收敛
社区把 SDD 推成方法论,产品把稳定部分收进去
先是社区用框架证明 vibe 不够,要有 spec 和流程,然后产品和 harness 把其中稳定的部分变得更易用
SDD 不是单点 feature,而是一条谱系:先把意图写成结构,再让 agent 执行结构
stream
artifact focus
what it proves
Spec-Kit / OpenSpec / BMAD spec / requirements / decisions
需求先结构化,agent 才能稳定执行
GSD / gstack phase / plan / state / verification
SDD 可以被打包成可复用 workflow
Superpowers / skills TDD / review / quality gate
工程纪律可以变成 agent 必须经过的门
Product modes plan / todos / context isolation
稳定 artifact 最后会被 bake 进产品入口
这页不要讲成“哪个工具更好”。重点是社区在同向收敛:vibe 不能承载复杂工程任务,所以大家把 spec、plan、state、review gate 做成 artifact。产品后来接走的,是这些 artifact 里最稳定、最通用的部分。
section/3 · sdd · 收束
SDD 不是终点,是给 Harness 铺路
SDD 把 intent 写成 artifactsruntime
2.x 时代继续往前走:agent 调什么、看什么、凭什么宣告完成,不只是写在文件里,而是被 runtime、产品和框架接管
收束要非常清楚:SDD 不是 Harness 的反面,而是 Harness 的输入层。没有 spec、plan、state、acceptance criteria 这些 durable artifacts,后面的 routines、/goal、Outcomes、proof pack 都缺少可接管的对象。
§ 4
## Harness 段2.x 时代 · 三个责任同时工程化:agent 调什么、看什么、凭什么宣告完成
section/4.1 · 三轴框架
当生成成本归零,瓶颈在三件事
"We view harness engineering as a subset of context engineering."
但 context 不是全部,今晚说的 harness 还包括 Skill、权限边界、流程节奏和 Verification,过去一年主要沿三条线收敛——
这里把术语钉死:harness 不是又一个工具名,也不是只等于 context。它是 agent 外面那圈工程边界。后面出现 product harness、local harness、routine、proof pack、workflow,都是这圈边界的不同打包方式,不要让听众以为在推荐一个单独工具。
section/4.1 · 三轴总览
三轴看的是:责任如何转移
Skill
行动入口
工具、命令、skills、Claude Routines:agent 被允许把意图转成哪些可执行动作
Context
信息入口
文件、memory、subagent、compact:agent 看见哪些高信号 token,以及哪些噪音被隔离
Verification
exit condition
rubric、tests、grader、proof pack:谁决定任务已经达到质量标准,可以停止
共同模式:人手动承担 → harness 显式化 → 产品内建
section/4.2 · skill 轴
Skill 轴:prompt 变成可调用能力
这条线不是“prompt 写得更长”,而是把稳定动作包装成 agent 可以发现、加载、调用、调度的能力
2025 · MCP
工具暴露出来
MCP 把外部能力接到 agent,但早期经常把工具说明全部塞进 system prompt
2025-10 · Skills
能力按需加载
Claude Skills 把说明、脚本、模板和资产打包,让 agent 在需要时再读
2026-02 · Codex Skills
跨产品跟进
同一个 pattern 进入 Codex:任务经验不再散在 prompt 里,而是进入可安装能力
2026 · Routines
能力可被调度
routine 把固定职责和触发节奏也封装进去:不是问一次,而是长期运行
section/4.2 · context 轴
Context 轴:不是越多越好,是高信号 token
从被动缓冲 → 手动裁剪 → 隔离/持久化 → 离线蒸馏,目标不是塞满窗口,而是提高每个 token 的命中率
Context is a critical but finite resource for AI agents. Find the smallest set of high-signal tokens that maximize the likelihood of your desired outcome.
0.2.107
CLAUDE.md @import
人手动剪上下文
1.0.41
subagent 隔离
独立 200K context · 不污染主线
1.0.x
claude-progress.txt
长 session 自动持久化
2026-05-06 →
Dreaming (preview)
idle 时复盘 session 提取 pattern 进 memory
反直觉点:更长上下文不是自动更强,高信号 context 才能减少 agent 在噪音里自信地走偏
section/4.2 · verification 轴
Verification 轴:done 从主观声明 变成证据循环
不是“多看一眼”,而是把判断标准、判断角色、判断证据从生成过程里拆出来
manual review
人看输出
diff、截图、artifact 靠人肉判断,agent 说 done 以后,人再补最后一道质量门
in-loop checks
检查进循环
tests、lint、checklist、rubric 被放进执行流程,不是写完再想,而是边跑边校准
fresh evaluator
生成者 ≠ 评审者
干净上下文里的 evaluator 按标准读 artifact,减少生成 agent 对自己输出的乐观偏差
evidence loop
generate → grade → revise → proof
Outcomes / proof pack 都是这条线:把“完成”变成可复查证据和可重复迭代
Outcomes :task success up to +10pp · docx +8.4% · pptx +10.1%
roboharness :long unattended run → proof pack → short human review
反直觉点:grader 不是让 first draft 更聪明,它提升的是 final deliverable quality,因为 first draft 不能自己宣布过线
这一页把 Verification 改成和 Skill / Context 对称的 pipeline。重点不是 Anthropic Outcomes 单点产品,而是 done 的性质变化:从 agent 或人主观说“差不多了”,变成 tests、rubric、fresh evaluator、proof pack 共同构成的证据循环。Outcomes 数字只作为 evidence loop 的证据,不展开成单独产品页。
section/4 · 收束
三轴收束
每一轴都经历同一个动作:人手动承担 → harness 显式化 → 产品内建
下一段:这套框架在我自己的项目里怎么落地
§ 5
# 我的实践不是工具推荐,而是三个真实场景里系统瓶颈被移走的方式
section/5.1 · roboharness · 叙事页
roboharness · 长跑证据包
移走的是审查瓶颈——agent 跑 4 小时改机器人代码,人不该一帧帧看完整过程,而是把 review 从“盯过程”换成“审证据包”
long unattended agent run
→
one proof pack / 证据包 → short human review
review path: 看 Run Decision banner → 只看关键 case → 用 phase_manifest 决定是否重跑
关键变化: 人不再验证完整过程,而是验证一个证据包——review 瓶颈从“盯 4 小时”变成“5 分钟做决策”
1 · INPUT
contract.yml
声明这次 run 必须满足的不变量,避免 review 时重新猜目标
2 · DURING RUN
phase_manifest
每个 phase 的 input / output / 决策点都被保留下来
3 · AFTER RUN
approval_report
grader agent 只筛出需要人看的 case,而不是整段执行日志
4 · HUMAN REVIEW
report.html
先看 Run Decision banner,再看关键 cases,最后决定 merge / rerun · 5 min
这页只讲“proof pack 的 4 步是什么 + 它换了 review 的什么”。下一页才用真实截图证明它长什么样。讲法:先指右边 4 张卡走一遍 pipeline,最后回到左边红字收束(4h→5min)。停一拍翻下一页。
section/5.1 · roboharness · 实证页
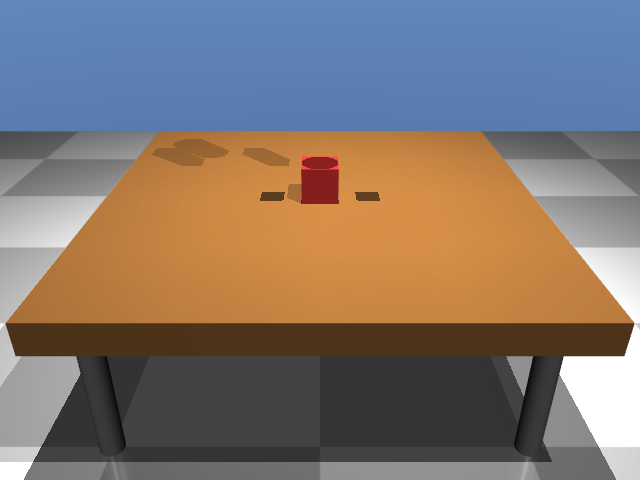
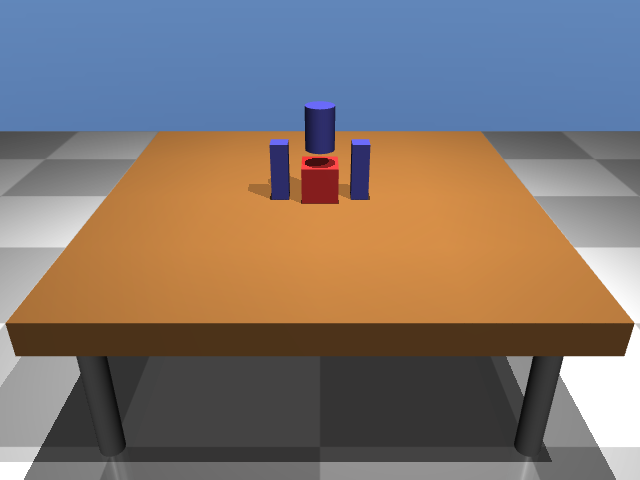
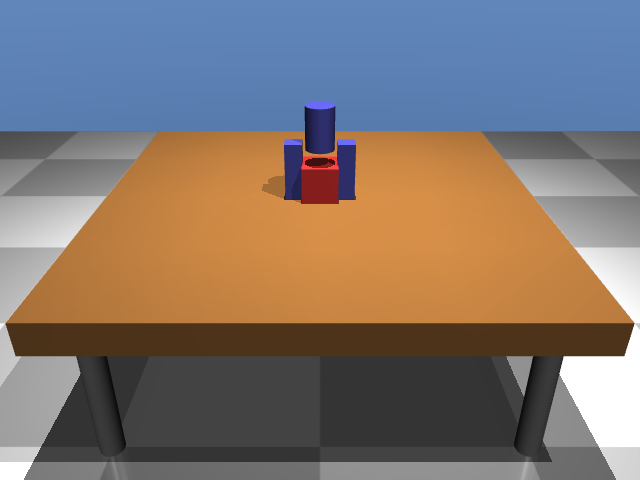
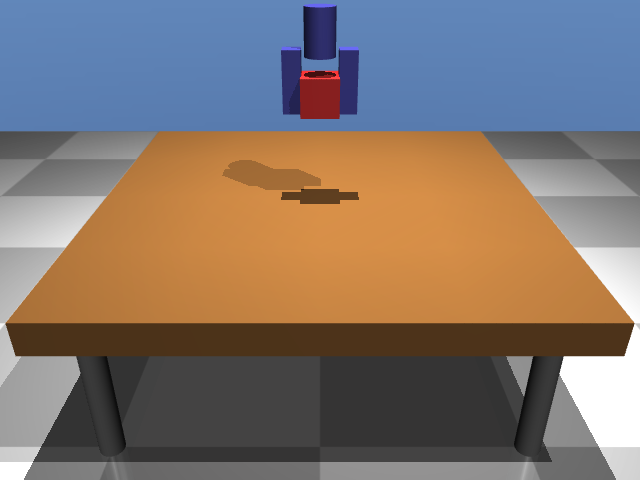
proof pack / 证据包长什么样:G1 humanoid run 的真实输出
不是手绘示意——下面这组就是 examples/g1_cross_framework_report.py 跑出来的证据视图,可直接进入 report.html
phase: pre_grasp
phase: contact
phase: grasp
phase: lift
项目自己的轨迹
这页是 P28a 的实证。GIF 是 README 头图:G1 humanoid 同一个 run 的 Meshcat 和 MuJoCo 跨 framework 比较,phase 名留在每帧上——这就是 proof pack 让人 5 分钟就能横扫的原因。右边 4 个 mujoco 抓取阶段是 baseline phase 帧的样子,证明每个 phase 都有 visual artifact。底部那行带出下一页的"同一项目走过两段"叙事。
section/5.2 · routine · 实证
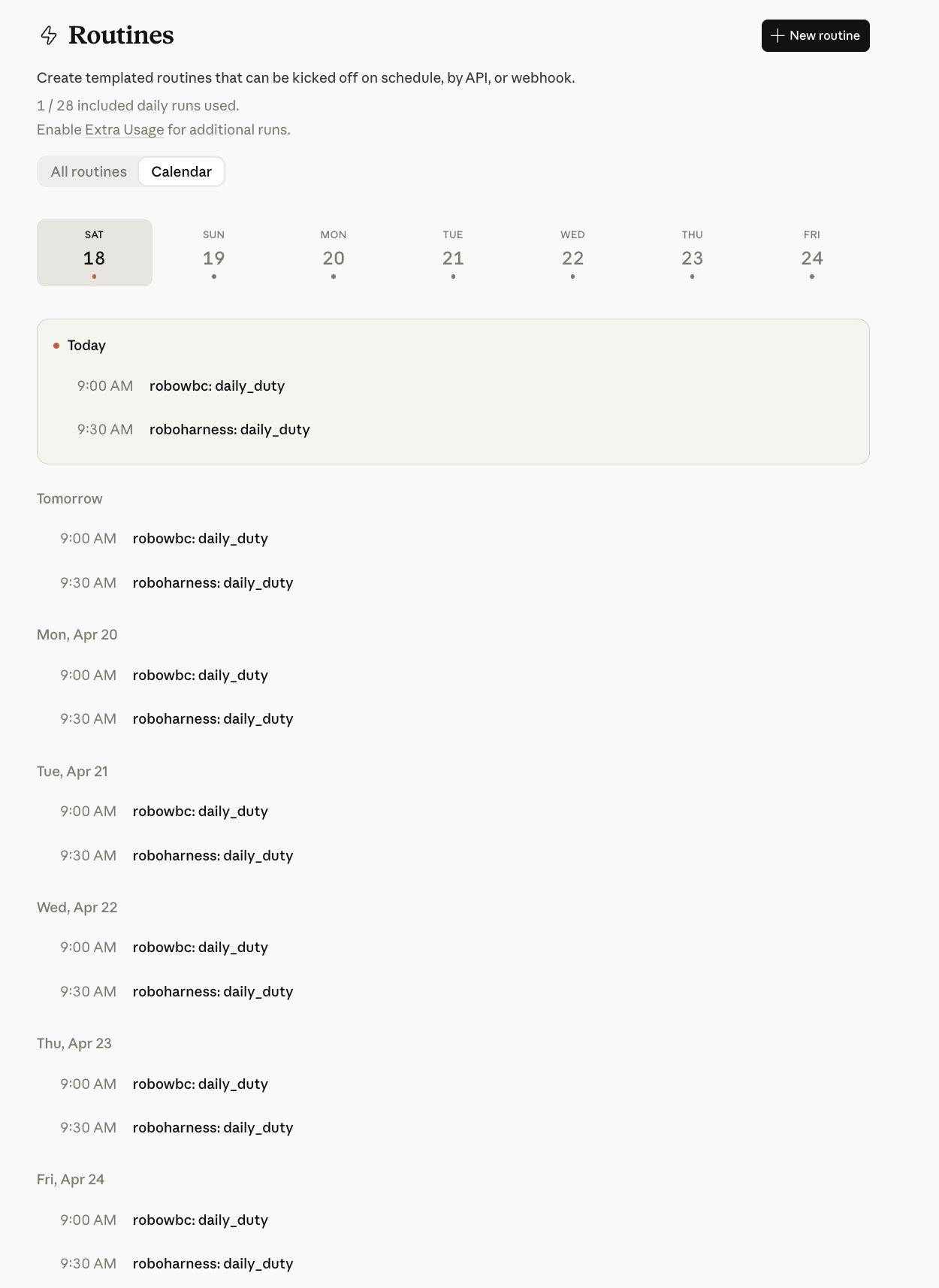
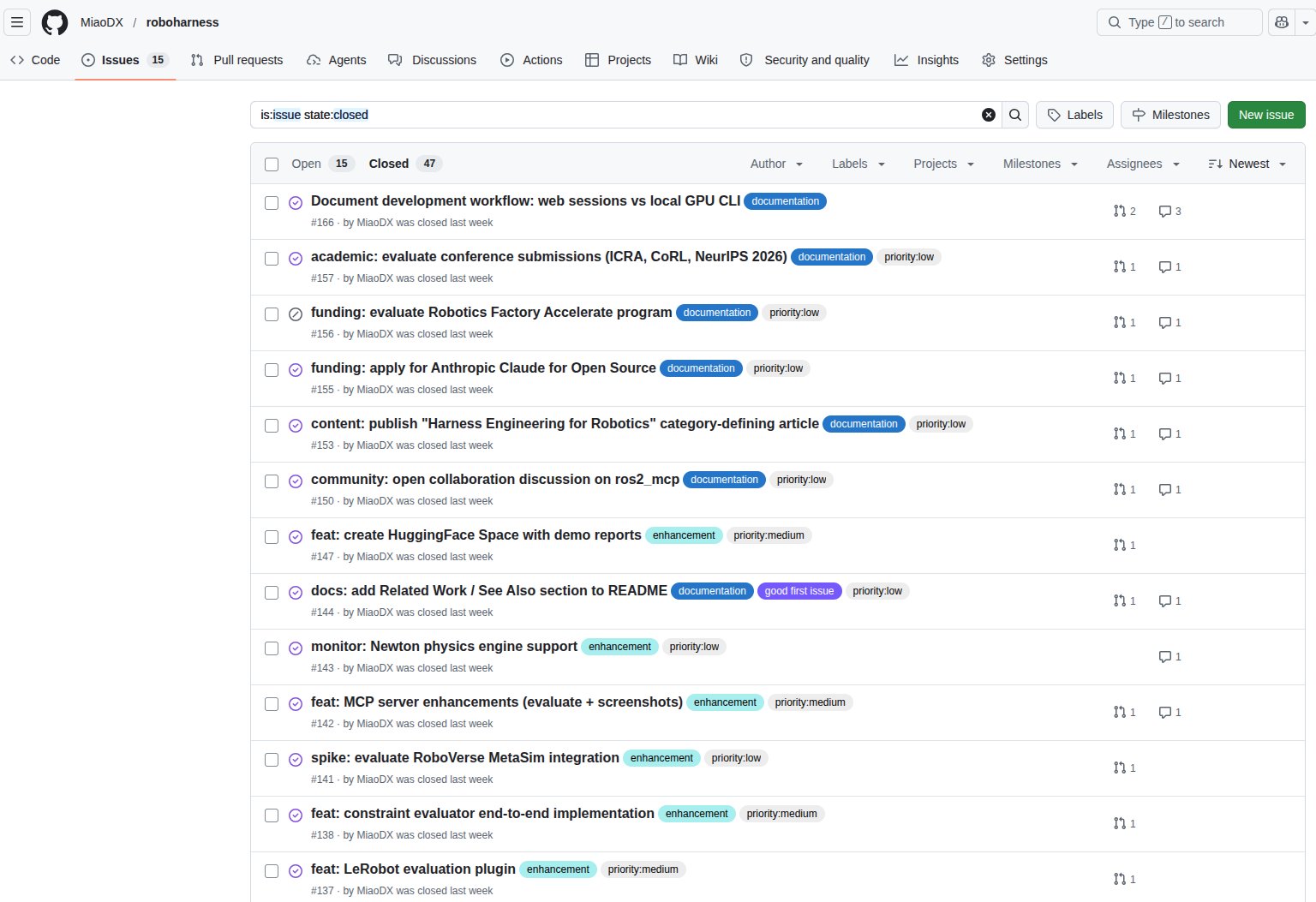
Claude Routines · 固定职责进云端
趋势不是多一个 prompt,而是 harness 可以被保存、触发,并在独立云端环境里运行
Trigger
定时 / API / GitHub
固定职责不再靠人想起来,而是按事件启动
Package
prompt + repo + connectors
把一次解释,变成可复用的 routine 配置
Run
clean cloud session
独立上下文运行,和本地长 session 分开
Evidence
label / comment / PR
结果回到 GitHub,留下可审查痕迹
schedule · daily_duty 9:00 / 9:30
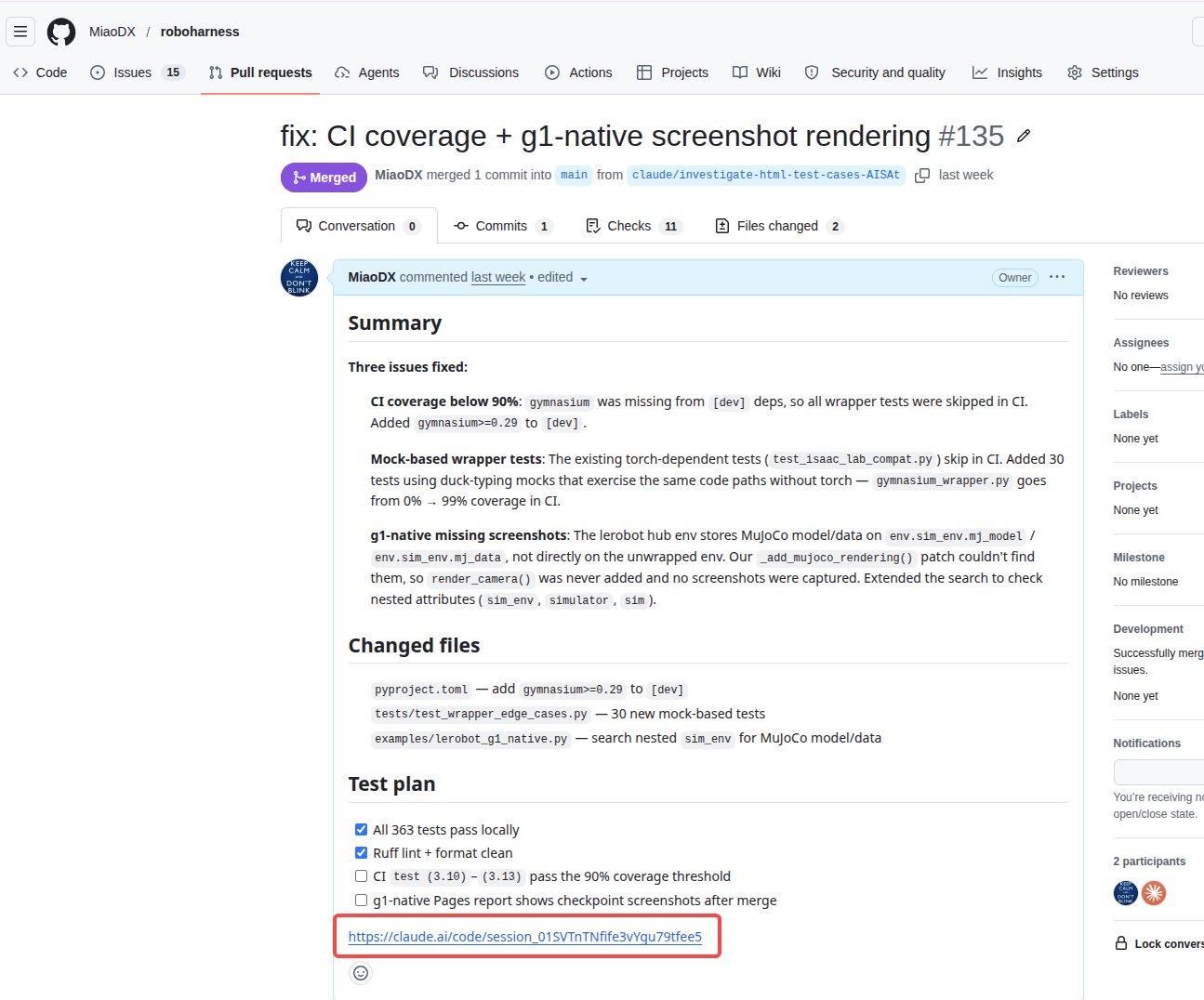
PR · auto_pr 产出 merged PR
这页把 Claude Routines 先讲成趋势:配置好的 harness 可以保存、触发,并在独立云端环境里运行。四张 cards 讲 trigger、package、run、evidence;下面三张截图证明 schedule 真的触发,issue 真的被标记,PR 真的产出。
section/5.2 · routine · 三轴定位
Claude Routines:从触发到交接的流水线
一个 routine 把触发、配置、独立运行、证据回传和边界交接串成闭环
Routine package
prompt / repo / connectors / environment 一起保存,固定职责变成可触发配置
Clean context
每次运行都从独立云端 session 开始,和本地长上下文分开
Completion check
三态自评(FULLY / PARTIAL / DIMINISHING)把 exit 条件写清楚,PARTIAL 是边界声明
Boundary
超过资源、时长或验证风险边界,就交给本地更重的 harness
Routines save Claude Code configuration and run on Anthropic-managed cloud infrastructure
— Claude Code docs · Routines research preview · code.claude.com/docs/en/routines
流水线页:架构图讲 trigger 到 handoff,不再讲复杂角色互联。右侧 4 行 fact 讲 routine package、clean context、completion check、boundary。底部文档来源只作为趋势背书:routine 是保存好的 Claude Code 配置,并在 Anthropic 托管的云端基础设施上运行。
section/5.3 · 60 分边界
"60 分" 是任务-工具匹配边界
不是产出完成度,而是判断哪些活交给 Claude Routines,哪些活切回本地重 harness
交棒触发 1
需要 GPU、真机、本地 dataset 或特殊运行时,云端 worker reach 不到
交棒触发 2
单次迭代超过 1 小时,60 分钟流水线很难完整闭环
交棒触发 3
预期要反复试错,过程就需要 contract / phase_manifest / approval_report 沉淀成证据包
对齐前置
mattpocock/skills
grill-me / grill-with-docs:让 AI 反问需求是否清晰
大范围工作流
GSD / gstack
discuss / plan / execute / verify,把跨多文件任务拆成可恢复 phase
高验证风险
roboharness
proof pack / 证据包让 unattended 长跑可以被快速 review
这不是工具排序:Claude Routines 是产品和云端 harness,GSD / gstack 是 workflow harness,roboharness 的 proof pack 是验证层。真正的判断是任务边界和验证风险在哪里
这页把原来的交棒页和 60 分判断页合并。先讲“60 分不是完成度,而是任务和工具是否匹配”。再读左侧三个交棒触发条件:资源、时长、反复试错。最后用右侧三张卡说明怎么选工具。roboharness 不是替代 Claude Routines,而是在资源密度和验证风险变高时接手。
section/5 · 收束
哪类活配哪种 harness——这本身就是工程判断
纵轴:验证风险 · 低 → 高
横轴:任务清晰度 · 模糊 → 清晰
risk / clarity
模糊
清晰
高验证风险
先规格化,再分 phase
GSD / gstack plan pipeline
需求还不稳,但错误成本高,先把目标、约束、验证标准写出来,再进入执行
长程执行 + 证据包
/goal + intuitive-flow + proof pack
任务清楚但验证风险高,让 agent 扛住长程目标,同时用 proof pack / 证据包缩短 review
低验证风险
先问清楚
grill-me / office-hours
风险不高但意图模糊,最便宜的动作是让 agent 反问,把想法压成可执行判断
重复调度和固定职责
Claude Routines
任务清楚、风险可控,auto_pr / daily_duty 这类固定职责适合云端周期运行
roboharness 不是单独象限,而是高验证风险任务里的 proof-pack 机制
§ 6
# 当下与未来产品内建的极致 · 用户表面回到 vibe,底层工程化反而更重
section/6 · /goal · 产品内建
/goal:目标和完成条件成为产品入口
不是替代 AGENTS.md / skills / permissions / subagents,而是把它们收进“我说目标”的入口
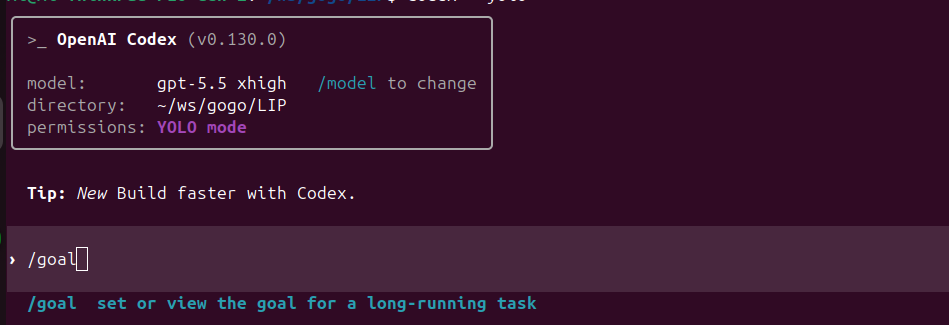
Codex 0.128.0 · /goal <objective> 把目标循环变成入口
Claude Code 2.1.139 · /goal 把 task completion criteria 变成入口
2026-04-30 UTC · Codex 0.128.0
/goal <objective> :把目标交给 Codex,让它拆动作、循环推进、持续收尾
2026-05-11 UTC · Claude Code 2.1.139
/goal :把 task completion criteria 变成显式命令,直接告诉 agent 什么叫完成
interesting convergence
同一个名字,两个重心:Codex 更像 objective loop,Claude 更像 exit condition command
这页加入两个截图作为主证据:Codex 和 Claude Code 都把 /goal 放到产品入口里。Codex 0.128.0 的 npm publish 是 2026-04-30 UTC,gdb 2026-05-01 推文公开讲 /goal objective;Claude Code 2.1.139 的 npm publish 是 2026-05-11 UTC,changelog 说 added /goal command to specify task completion criteria。讲法:OpenAI 先把“目标循环”做成入口,Anthropic 紧接着把“完成条件”做成入口。真正有趣的是同一个命令名在收敛,但它们强调的是同一条 harness 的两端:objective 和 exit condition。
section/6 · caveat
产品内建也会引入新失败模态
Anthropic 2026-04-23 quality post-mortem 是产品内建引发新失败模态的活教材
cause 1
reasoning effort 改 default
触发用户不可察觉的退化
cause 2
thinking-history 清理 bug
长 session 上下文被错误压缩
lesson
产品化 ≠ 终点
harness 接走的越多,反向出错的成本也越高
section/7 · 回到困境
everything is skill issue —— 但 skill issue 的边界在移动
仍需自己解
judgment
什么活配什么 harness、何时介入、何时放手
被产品消化
机制
plan / hooks / subagents / outcomes
被 skill 走
特定能力
skill 取代 prompt 的「再说一遍」
下次 agent 失败时,先别问"模型是不是不行"
我们不必再是系统瓶颈
"or it's a skill issue, and we just haven't figured out how to use it. So, it's hard to tell." — Karpathy
§ 8
# Tips三件今晚就能做的实验:整理 harness、让 agent 反问、用最好模型跑真实任务
section/8 · slide 1 · 把环境装好
实验 1 · 把 harness 环境整理到最新
↪ TIP 3
·
但 model 也不能省 —— 待会儿 Tip 3 会接这条线
每天第一件事:升级所有工具 · claude --upgrade · codex · MCP servers · skills
tool kit
github.com/MiaoDX/claude-devkit
我整理的 daily-update 工具集
权限
clean workspace first
干净分支 / git / CI / secret 边界先到位,再减少审批 prompt
版本
落后两周先升级
很多失败不是 prompt 问题,是 harness 版本还停在旧默认里
section/8 · slide 2 · 试这些方法
实验 2 · 先让 agent 问我们,再让它干
01
试一次 office-hours
用 YC 风格 forcing questions 把“我想做个东西”压成可执行判断
02
跑一次 grill-me
让 AI 先反问需求是否清晰,被盘问过一次,就很难再回到直接写 prompt
03
写清验收标准
把完成条件、non-goals 和验收样例写出来,让 agent 先对齐再执行
section/8 · slide 3 · 心态
实验 3 · 用我们能用到的最好模型跑真实任务
↩ TIP 1
·
model 决定能力上限,harness 决定能力能否稳定转成交付
SaaS frontier model 可以用就直接用
最容易失败的方式:回去想"我下周开始整这套"今晚就拿一个真实任务试一次
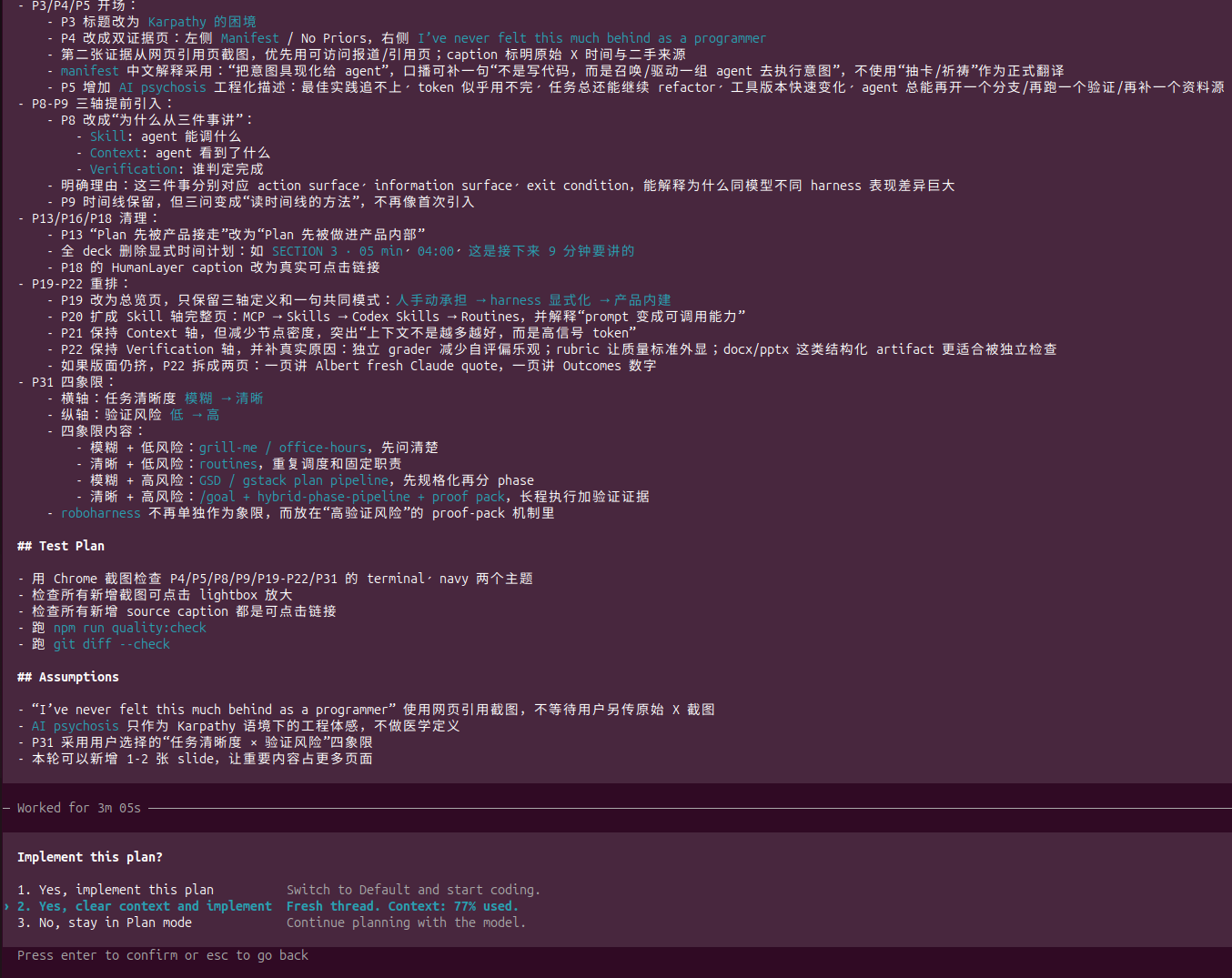
section/8 · bonus · 长程任务组合
最近好用的一个大杂烩:intuitive-flow
把 grill / office-hours、docs/plans、autoplan、GSD 和 Codex 的 /goal 串起来,最近一周在高频使用,体感上很适合较为复杂的长程任务
idea shaping
用 grill / office-hours 把模糊想法先压成可执行判断
source of truth
用 docs/plans、autoplan、GSD phase 让计划和执行各有唯一权威
codex /goal
用一个持续目标把长程执行、反复检查和最终收尾串起来
这页放在 Tips 后面当 bonus,不展开成教程。口播重点:intuitive-flow 不是一个全新的框架,而是把现有几个好用的东西粘成了一个长程任务方式,再用 /goal 扛住最终目标。
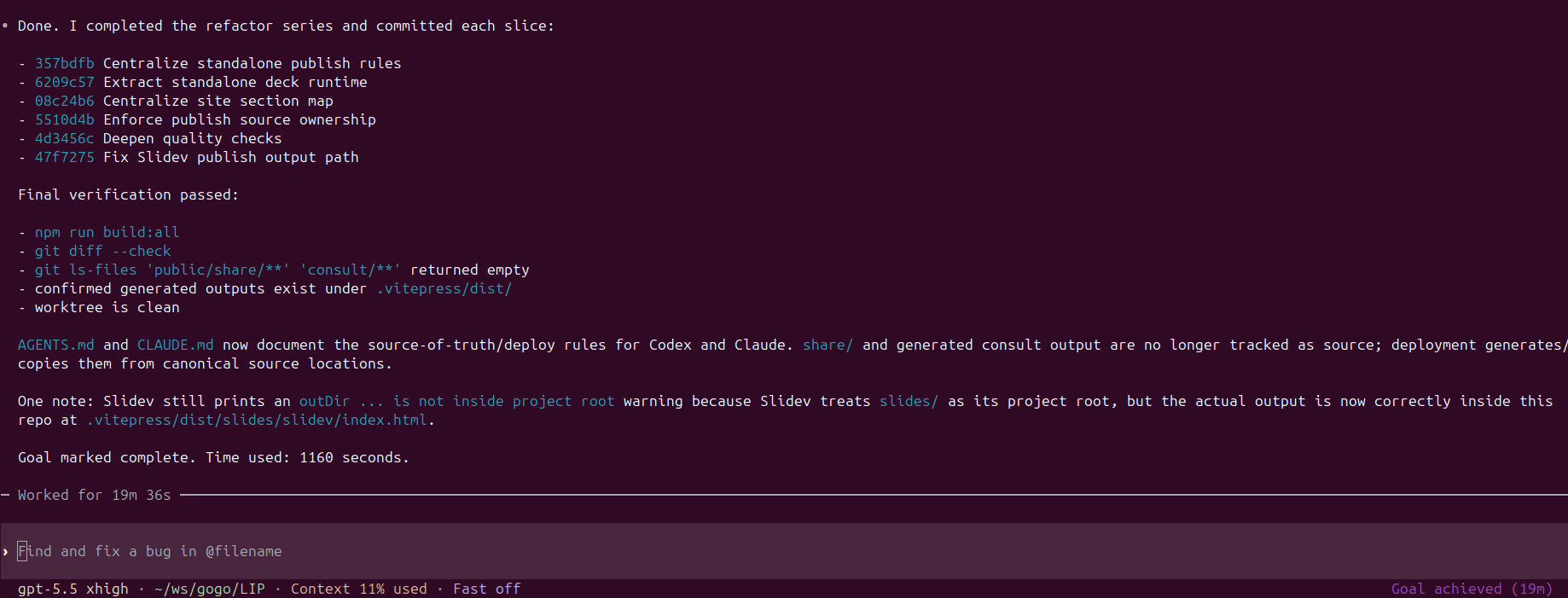
section/8 · coda · 这场 lecture 的准备
这场 lecture 的准备,也是同一套 workflow
云端先把方向跑出来,本地再用完整 repo context 做细节、证据和 QA
cloud / phone
claude.ai 手机端先出初始版本
在路上先讨论题目、听众、主线和讲稿骨架,把模糊想法压成能继续推进的 draft
local / repo
本地再做细节调整和验证
回到 repo 里处理截图、链接、版面、source caption、主题截图和质量检查,细节靠本地 harness 收口
这也正是整场要讲的:云端负责快速 manifest,本地 harness 负责 context、verification 和最后一公里
section/9 · Q&A
Q & A — discussion —






底层更 engineering:目标、上下文、验证条件都被产品接管