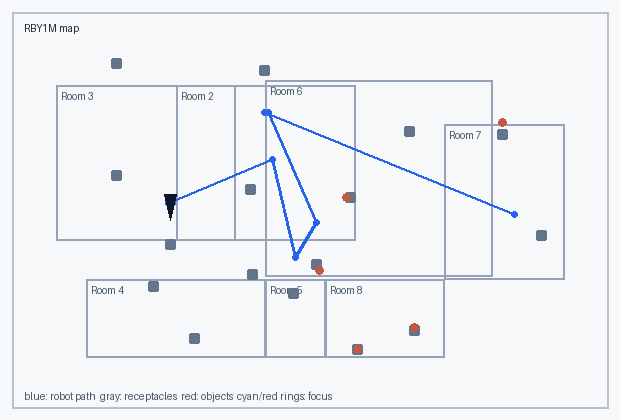
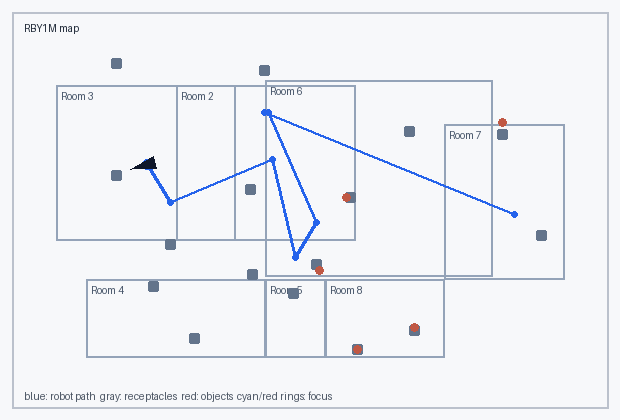
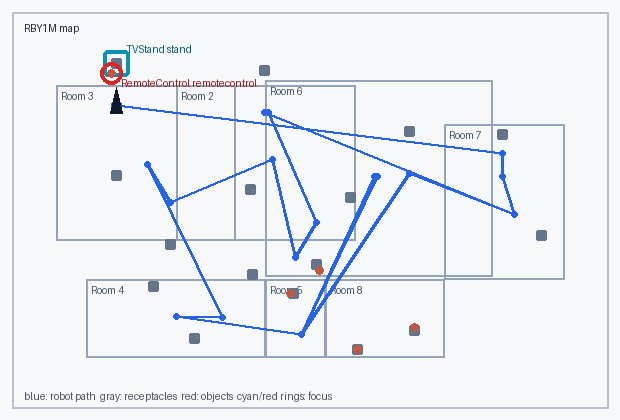
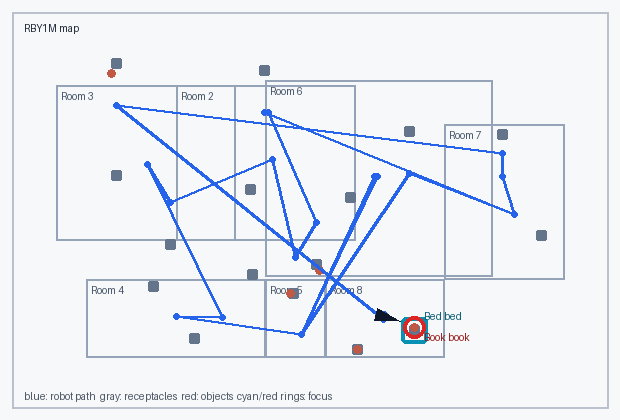
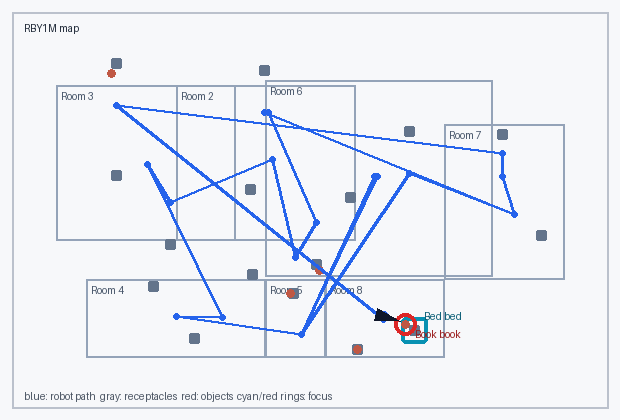
Robot View Timeline
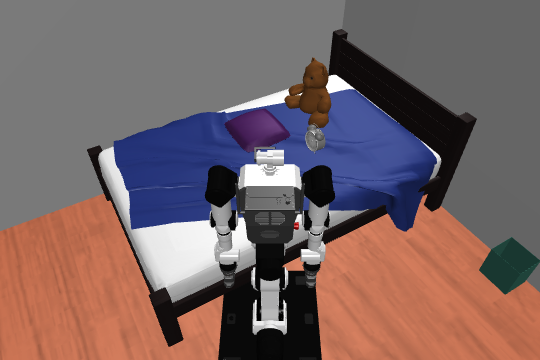
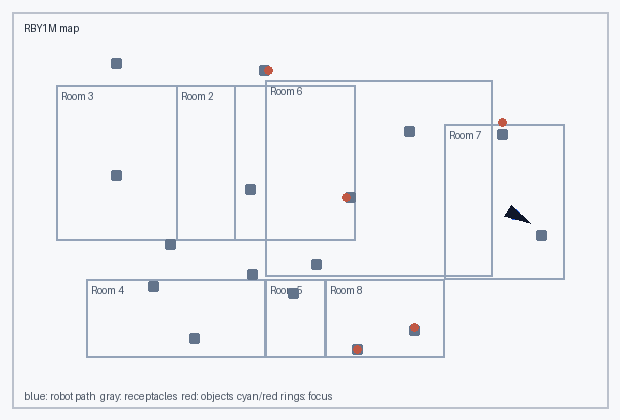
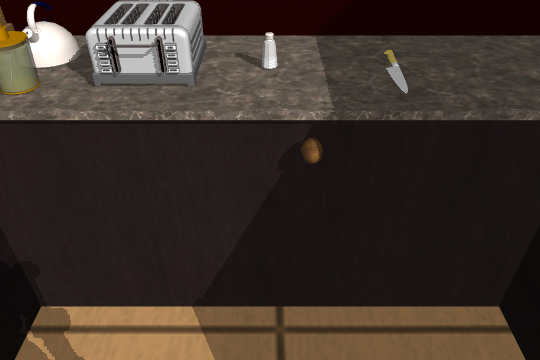
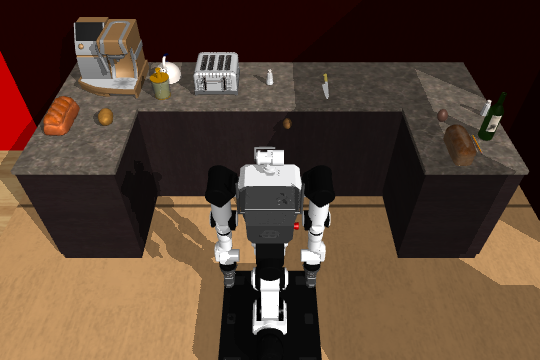
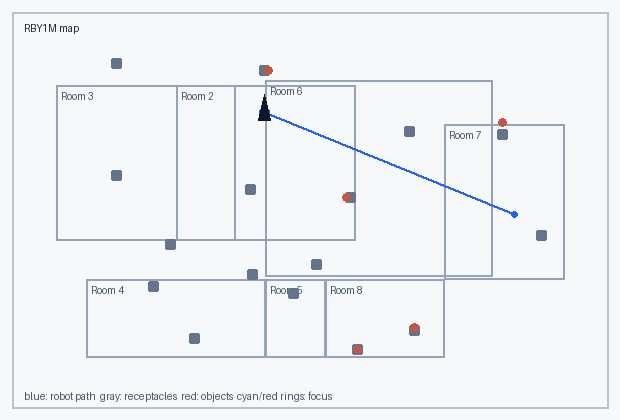
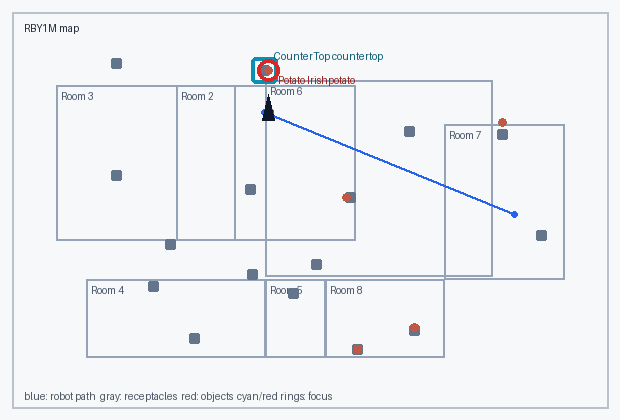
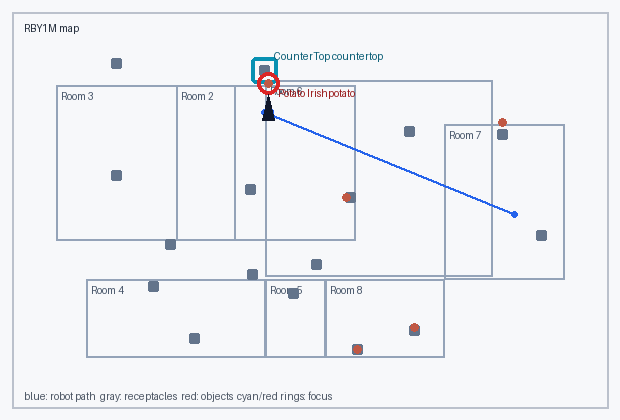
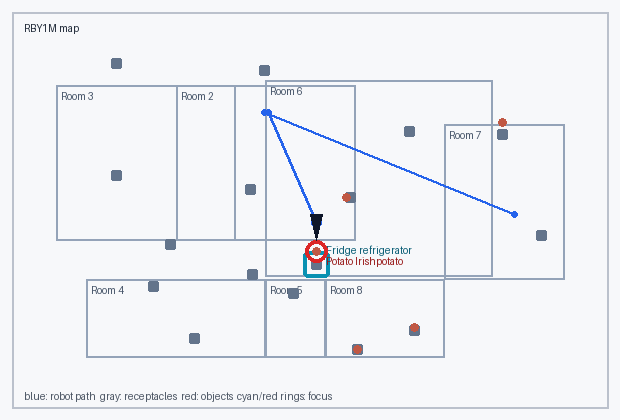
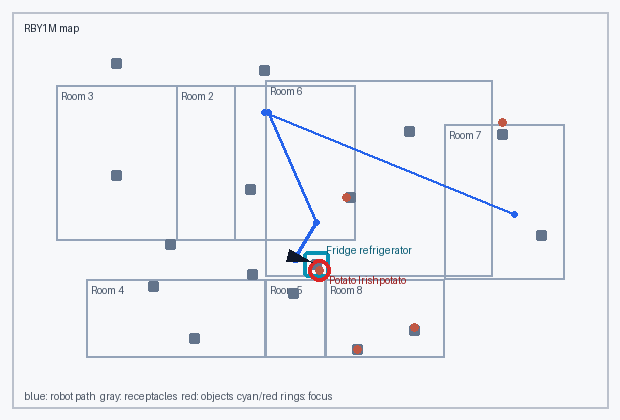
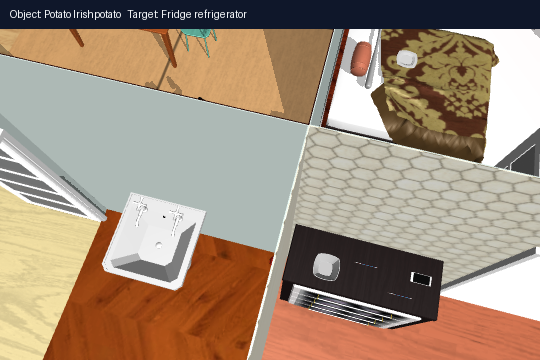
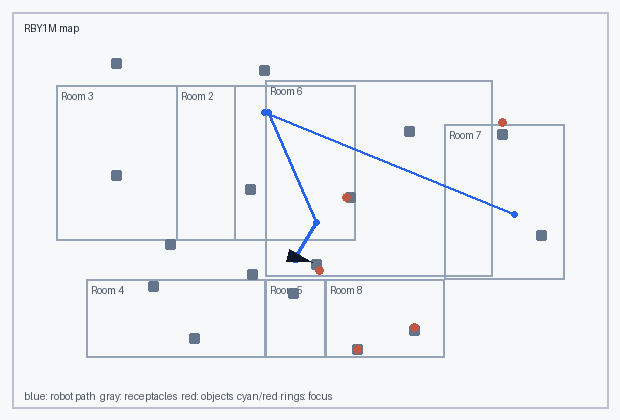
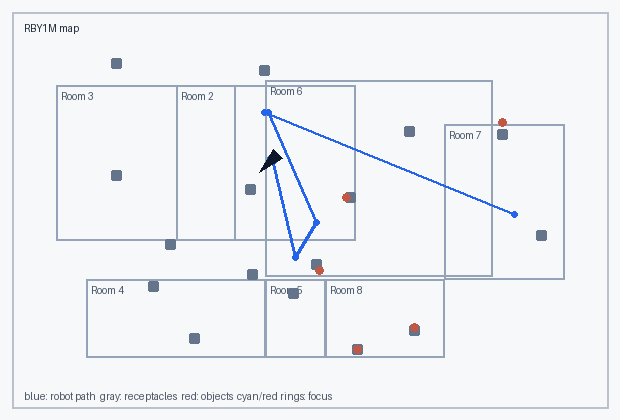
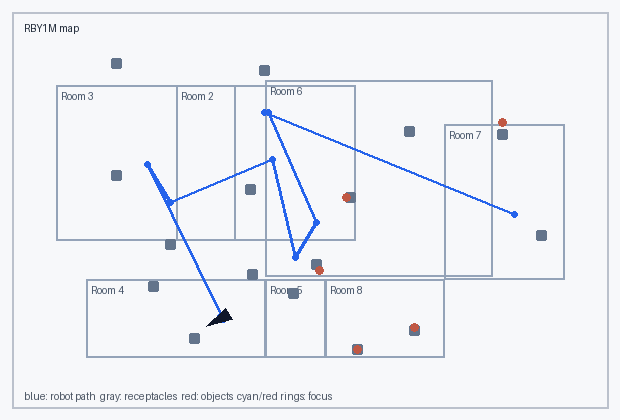
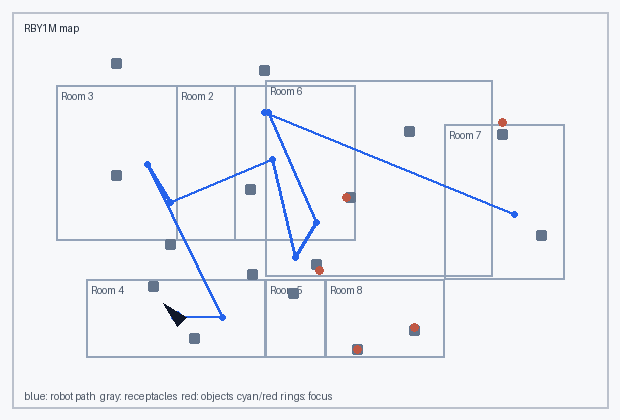
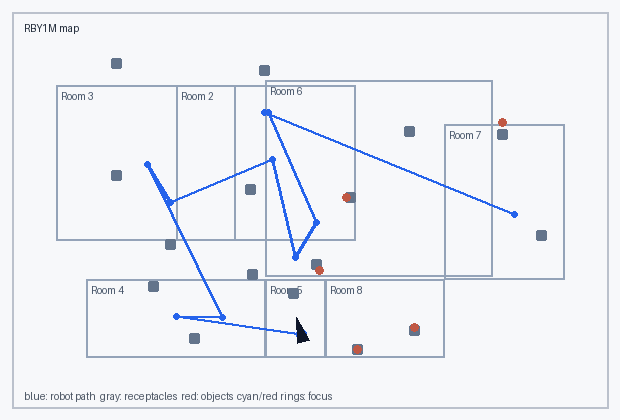
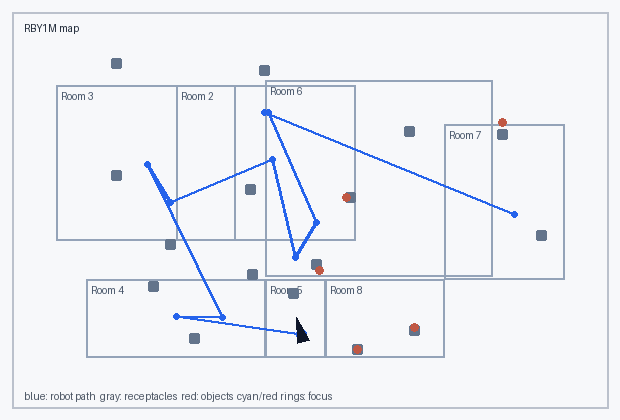
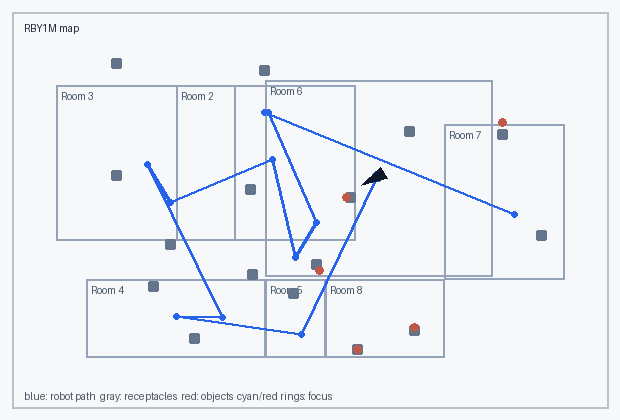
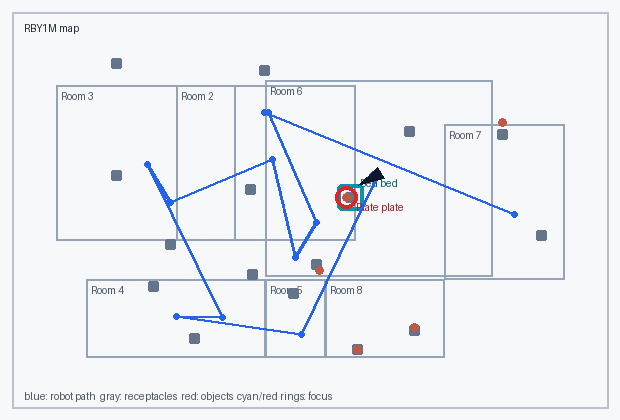
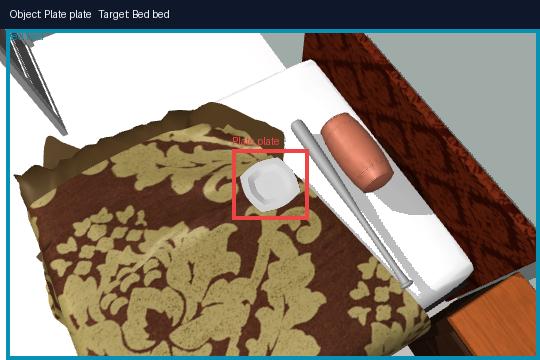
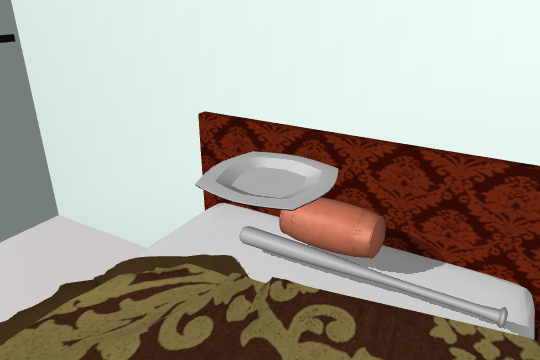
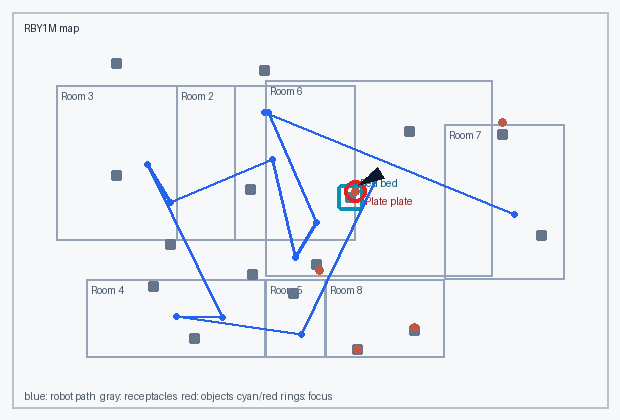
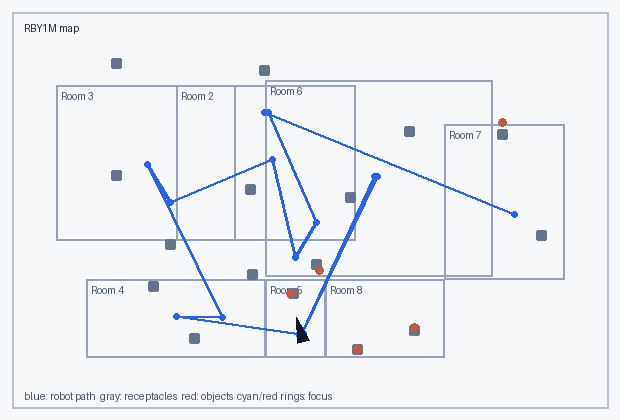
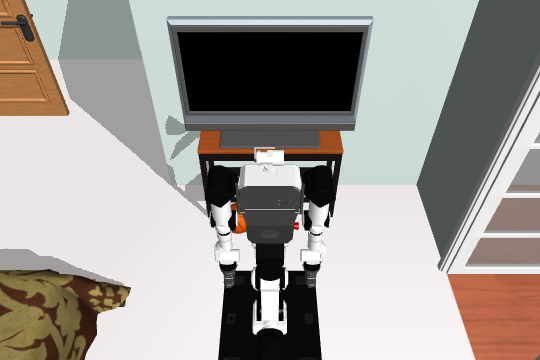
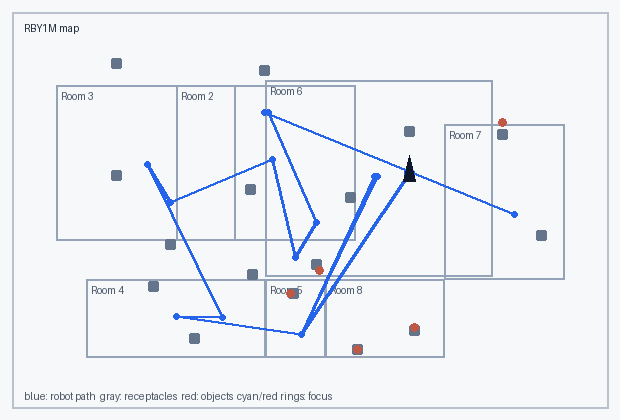
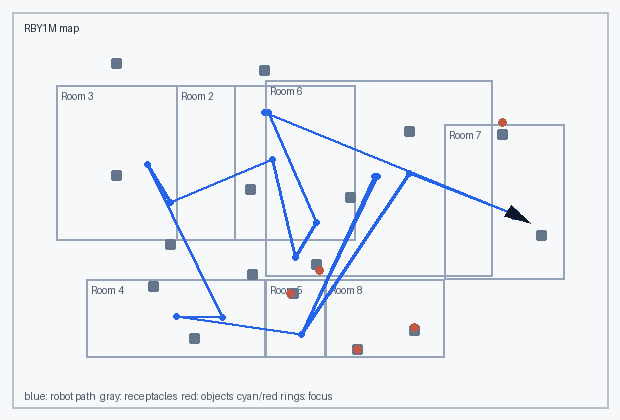
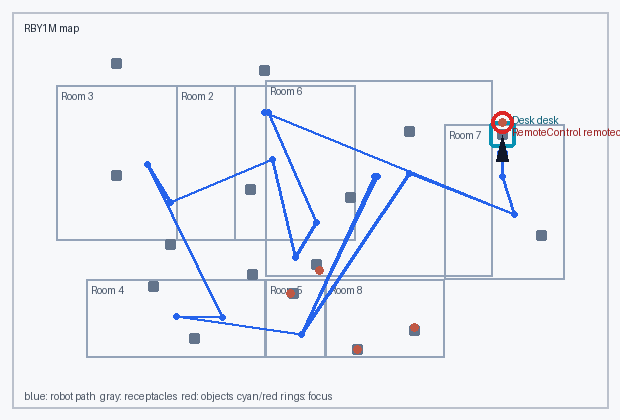
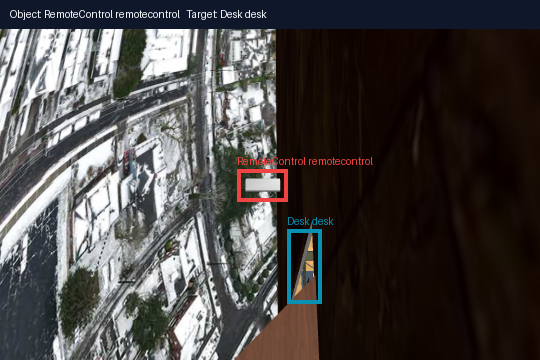
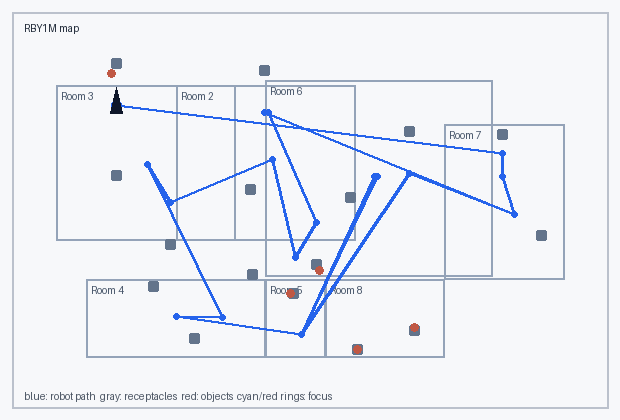
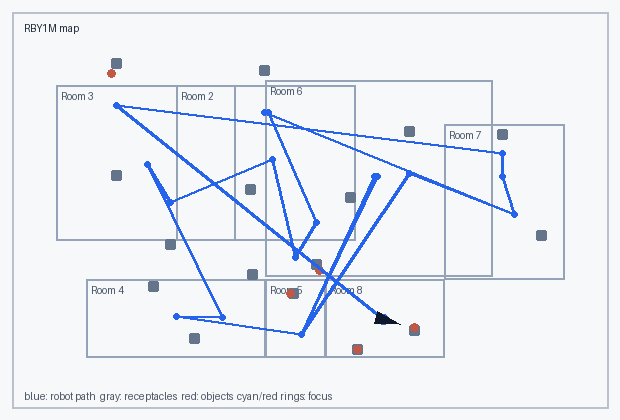
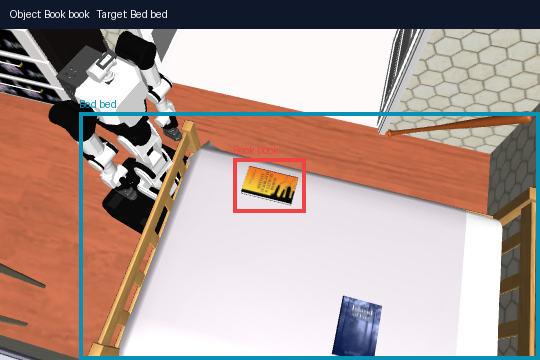
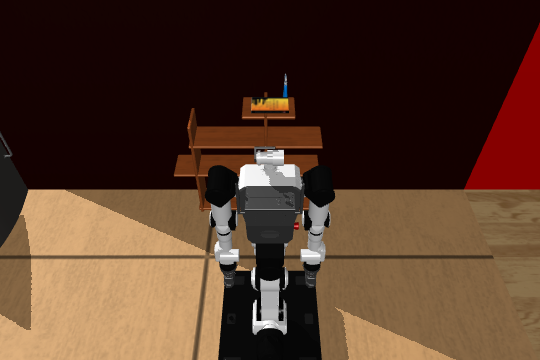
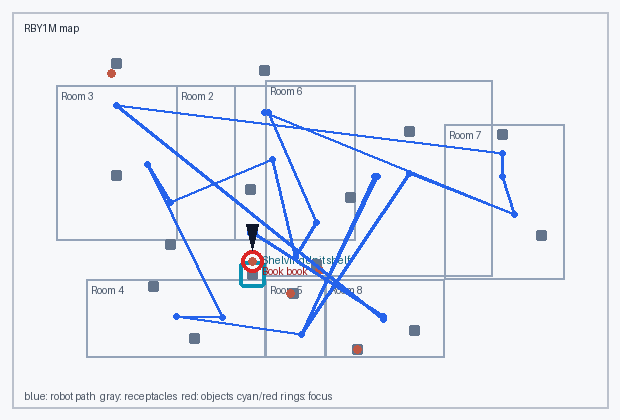
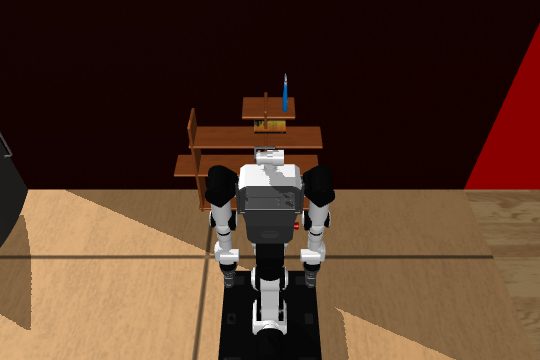
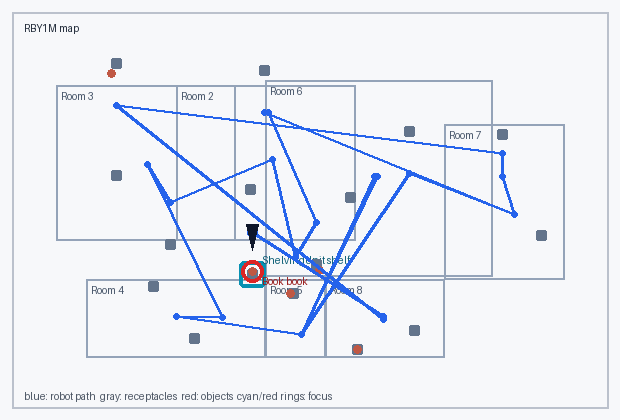
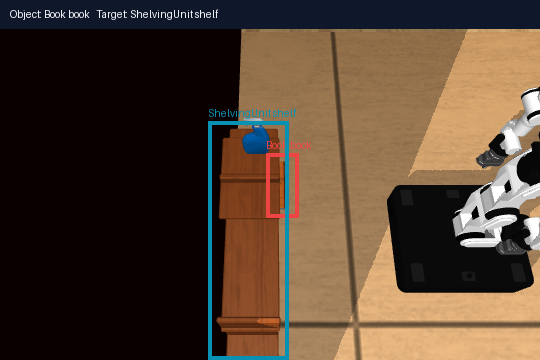
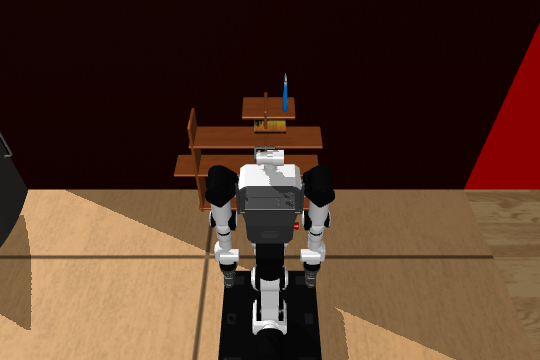
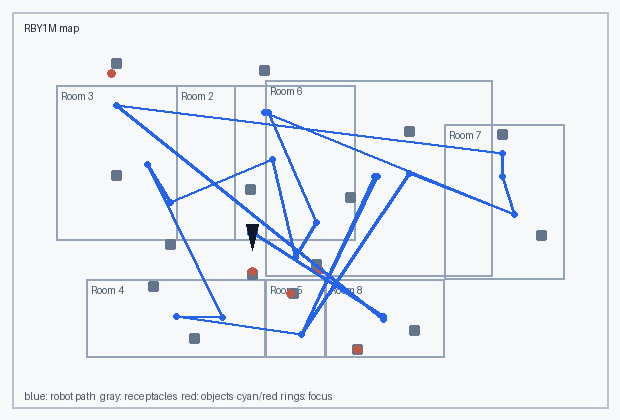
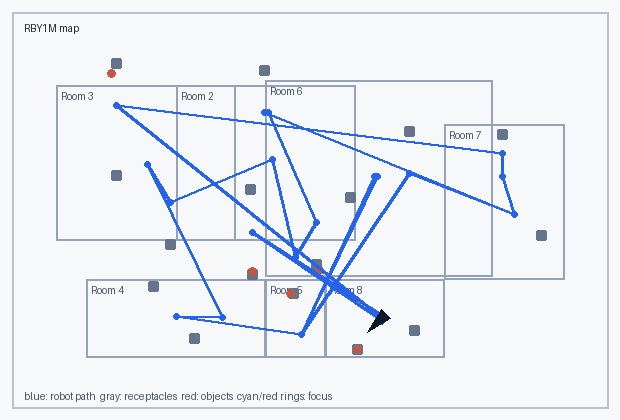
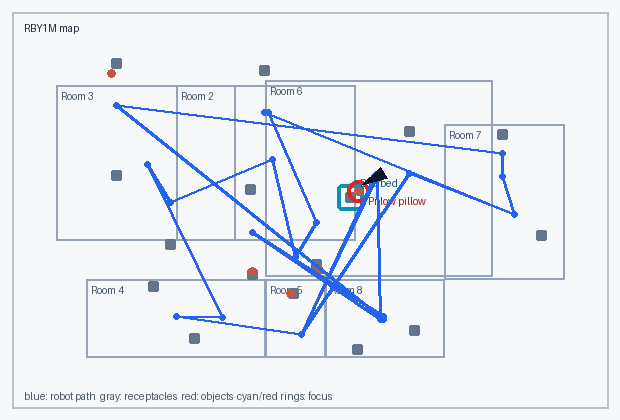
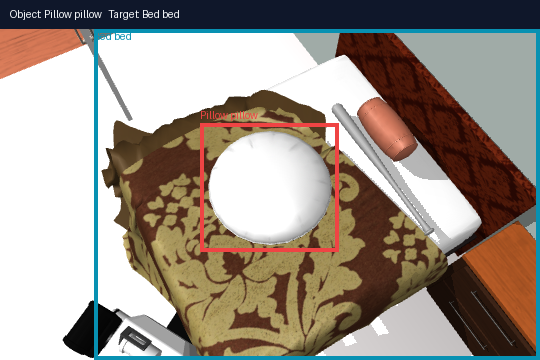
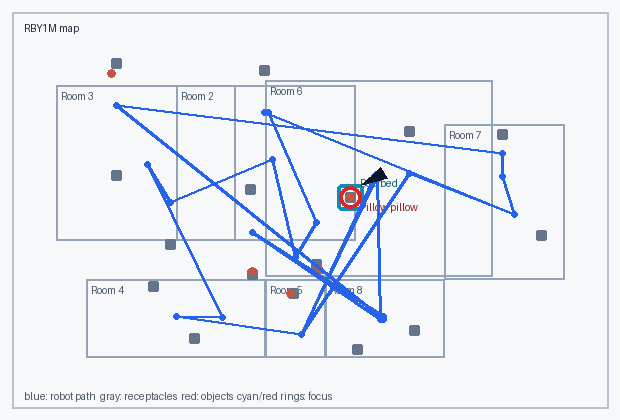
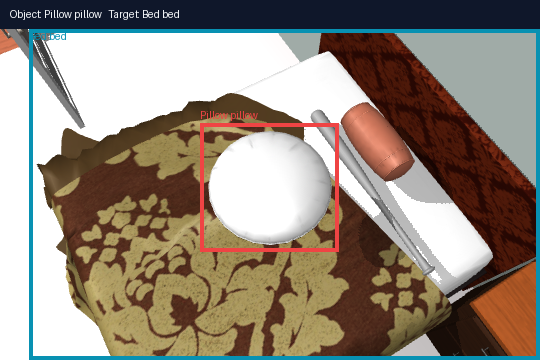
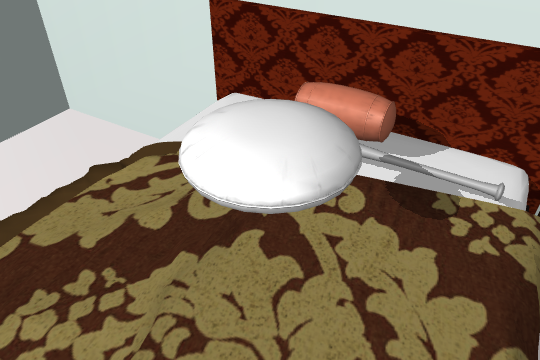
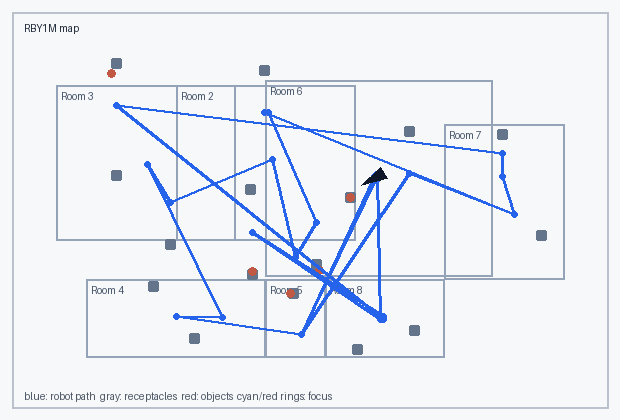
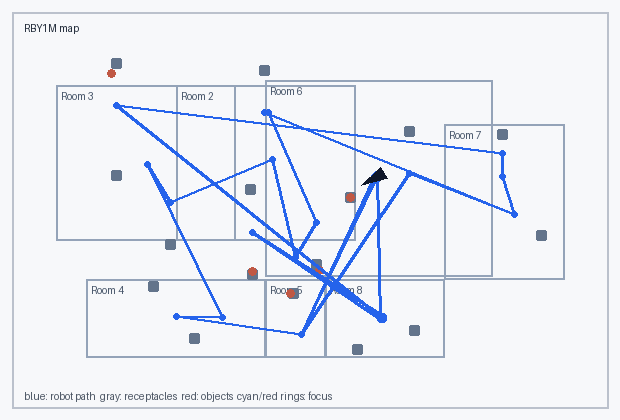
FPV and chase are rendered from the RBY1M MuJoCo scene. Chase is a report_only_simulation_view, not policy input. The map and verification panels are report artifacts from public MuJoCo state, not private scoring manifest data. Observe role badges distinguish post-place verification from the next waypoint scan. Focus badges are public-state object/receptacle bindings; visibility badges say whether that bound object is actually visible in the current frame.
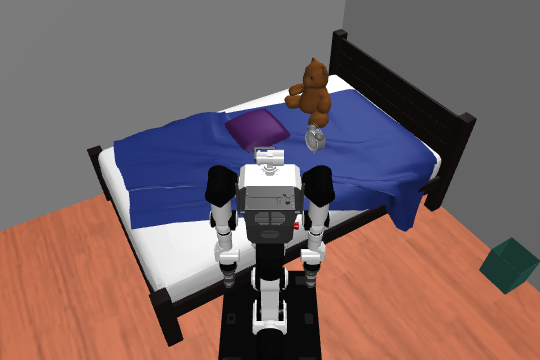
1. before
x=15.298371 y=6.05818 theta=-0.523599 head_pitch=0.659569
Theta: target_facing_base_yawHead pitch: target_framing_head_pitchRoom: same room (room_7 -> room_7)
2. observe
x=6.37057 y=8.8752 theta=1.570796 head_pitch=0.653613
Observe role: waypoint scanRaw role: coverage_scan_observe
Theta: target_facing_base_yawHead pitch: target_framing_head_pitchRoom: same room (room_2 -> room_2)
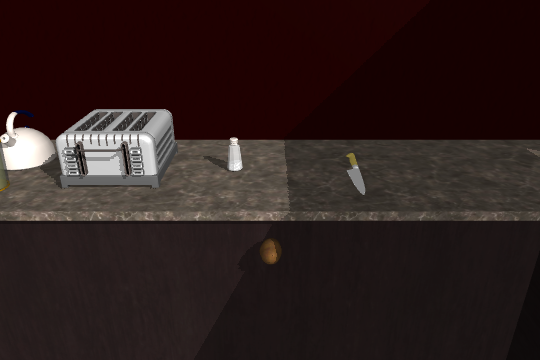
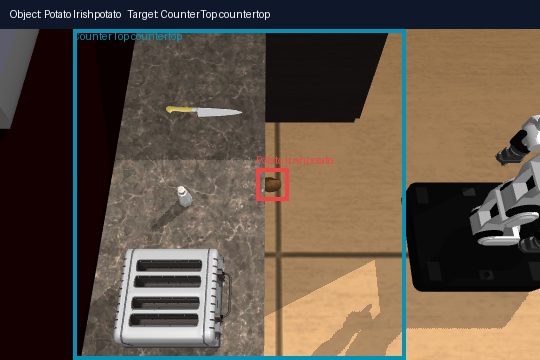
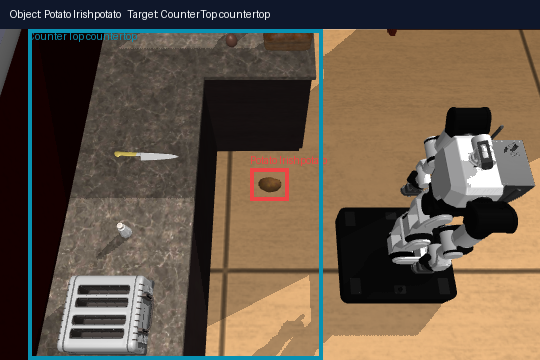
3. navigate_to_object observed_001
x=6.49057 y=8.8752 theta=1.570796 head_pitch=0.432436
Subphase: navRole: objectRaw phase: navigate_to_object
Handle: observed_001Object: Potato IrishpotatoTarget: CounterTop countertopFocus provenance: public_mujoco_state_report_aid
Theta: target_facing_base_yawHead pitch: target_framing_head_pitchRoom: same room (room_2 -> room_2)FPV visibility: object 458 px, target 110873 pxVerify visibility: object 202 px, target 58154 px
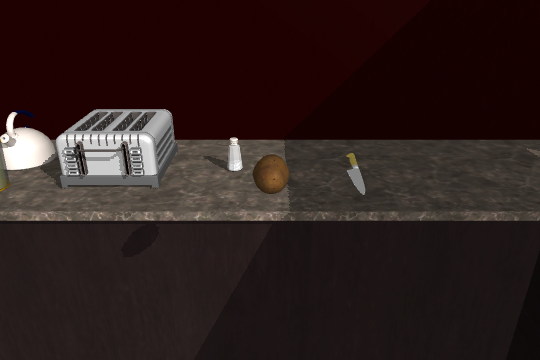
4. pick observed_001
x=6.49057 y=8.8752 theta=1.570796 head_pitch=0.432436
Subphase: pickRole: objectRaw phase: pick
Handle: observed_001Object: Potato IrishpotatoTarget: CounterTop countertopFocus provenance: public_mujoco_state_report_aid
Theta: target_facing_base_yawHead pitch: target_framing_head_pitchRoom: same room (room_2 -> room_2)FPV visibility: object 1099 px, target 110232 pxVerify visibility: object 265 px, target 55303 px
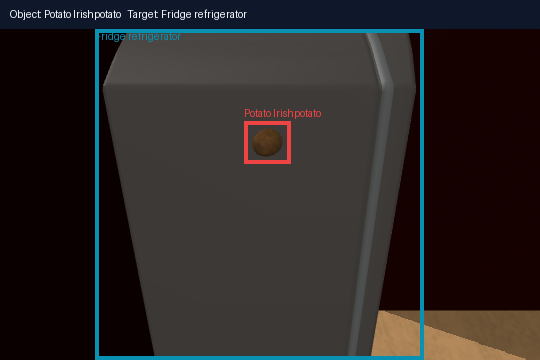
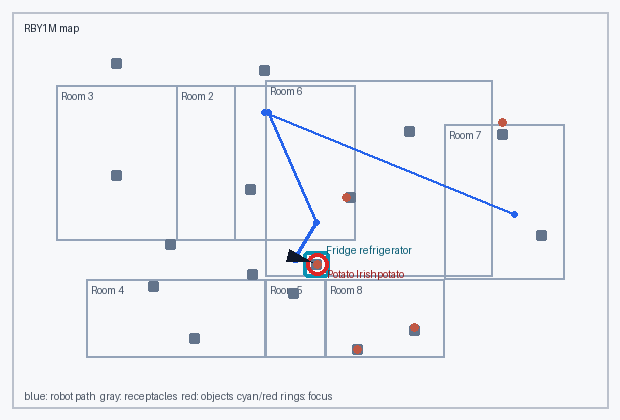
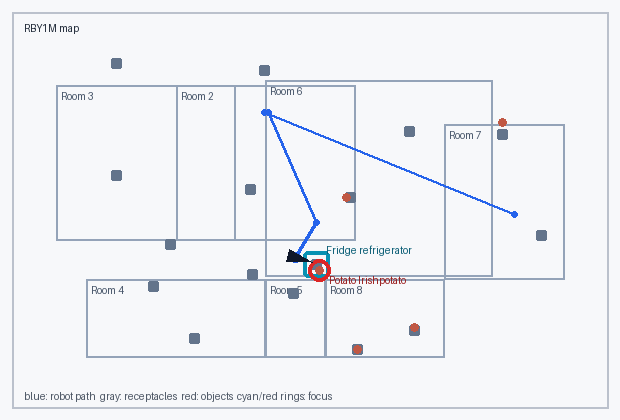
5. navigate_to_receptacle refrigerator_5e0d26d670a75ae0a52f2ceb08914b0e_1_0_2
x=8.24185 y=5.83376 theta=-1.570796 head_pitch=0.514687
Subphase: navRole: targetRaw phase: navigate_to_receptacle
Object: Potato IrishpotatoTarget: Fridge refrigeratorFocus provenance: public_mujoco_state_report_aid
Theta: target_facing_base_yawHead pitch: target_framing_head_pitchRoom: same room (room_6 -> room_6)FPV visibility: object 653 px, target 96523 pxVerify visibility: object 653 px, target 96523 px
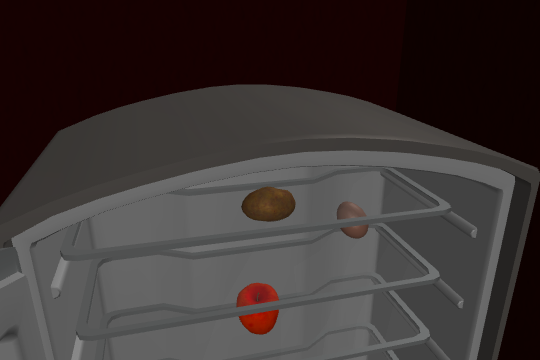
6. open_receptacle refrigerator_5e0d26d670a75ae0a52f2ceb08914b0e_1_0_2
x=7.48185 y=4.88376 theta=-0.257324 head_pitch=0.365064
Subphase: openRole: targetRaw phase: open_receptacle
Object: Potato IrishpotatoTarget: Fridge refrigeratorFocus provenance: public_mujoco_state_report_aid
Theta: opened_receptacle_access_yawHead pitch: target_framing_head_pitchRoom: same room (room_6 -> room_6)FPV visibility: object 1451 px, target 125129 pxVerify visibility: object 1451 px, target 125129 px
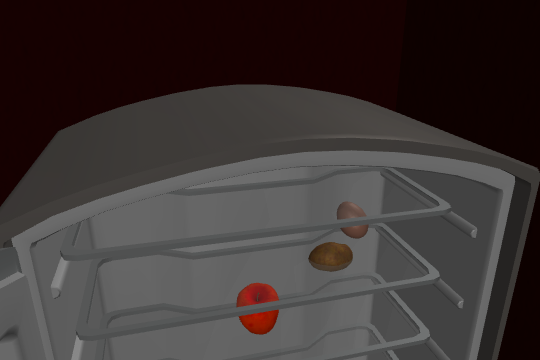
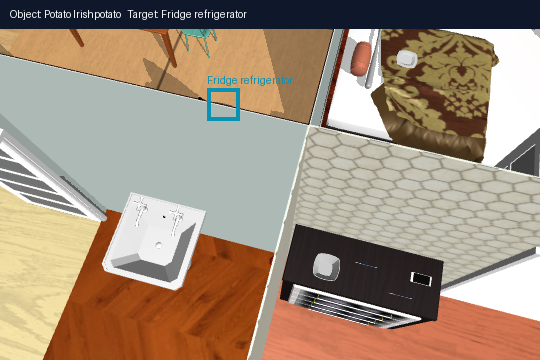
7. place_inside observed_001
x=7.48185 y=4.88376 theta=-0.257324 head_pitch=0.365064
Subphase: placeRole: insideRaw phase: place_inside
Handle: observed_001Object: Potato IrishpotatoTarget: Fridge refrigeratorFocus provenance: public_mujoco_state_report_aid
Theta: opened_receptacle_access_yawHead pitch: target_framing_head_pitchRoom: same room (room_6 -> room_6)FPV visibility: contained_inside: object contained inside, target 125768 pxVerify visibility: contained_inside: object contained inside, target 15 px
8. close_receptacle refrigerator_5e0d26d670a75ae0a52f2ceb08914b0e_1_0_2
x=7.48185 y=4.88376 theta=-0.257324 head_pitch=0.365064
Subphase: closeRole: targetRaw phase: close_receptacle
Object: Potato IrishpotatoTarget: Fridge refrigeratorFocus provenance: public_mujoco_state_report_aid
Theta: opened_receptacle_access_yawHead pitch: target_framing_head_pitchRoom: same room (room_6 -> room_6)FPV visibility: contained_inside: object contained inside, target 131154 pxVerify visibility: contained_inside: object contained inside, target not visible
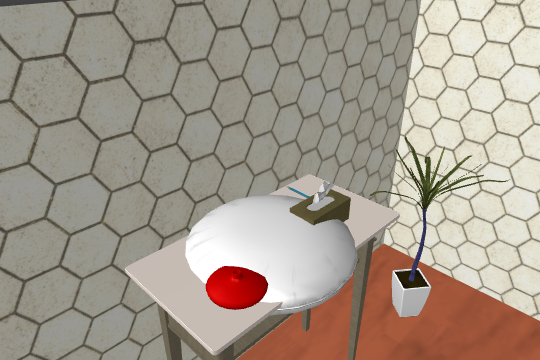
9. observe
x=7.48185 y=4.88376 theta=-0.257324 head_pitch=0.365064
Observe role: post-place verificationRaw role: post_place_observe
Theta: opened_receptacle_access_yawHead pitch: target_framing_head_pitchRoom: same room (room_6 -> room_6)
10. observe
x=6.666013 y=7.563513 theta=-2.356194 head_pitch=0.703146
Observe role: waypoint scanRaw role: coverage_scan_observe
Theta: target_facing_base_yawHead pitch: target_framing_head_pitchRoom: same room (room_2 -> room_2)
11. observe
x=2.99516 y=6.38413 theta=-1.570796 head_pitch=0.703146
Observe role: waypoint scanRaw role: coverage_scan_observe
Theta: target_facing_base_yawHead pitch: target_framing_head_pitchRoom: same room (room_3 -> room_3)
12. observe
x=2.170445 y=7.433702 theta=-2.879793 head_pitch=0.69736
Observe role: waypoint scanRaw role: coverage_scan_observe
Theta: target_facing_base_yawHead pitch: target_framing_head_pitchRoom: same room (room_3 -> room_3)
13. observe
x=4.871109 y=3.23213 theta=-2.617994 head_pitch=0.618459
Observe role: waypoint scanRaw role: coverage_scan_observe
Theta: target_facing_base_yawHead pitch: target_framing_head_pitchRoom: same room (room_4 -> room_4)
14. observe
x=3.204493 y=3.258077 theta=2.356194 head_pitch=0.712386
Observe role: waypoint scanRaw role: coverage_scan_observe
Theta: target_facing_base_yawHead pitch: target_framing_head_pitchRoom: same room (room_4 -> room_4)
15. observe
x=7.703332 y=2.773295 theta=1.832596 head_pitch=0.623473
Observe role: waypoint scanRaw role: coverage_scan_observe
Theta: target_facing_base_yawHead pitch: target_framing_head_pitchRoom: same room (room_5 -> room_5)
16. observe
x=7.703332 y=2.773295 theta=1.832596 head_pitch=0.623473
Observe role: waypoint scanRaw role: coverage_scan_observe
Theta: target_facing_base_yawHead pitch: target_framing_head_pitchRoom: same room (room_5 -> room_5)
17. observe
x=10.421889 y=7.09524 theta=-2.617994 head_pitch=0.640633
Observe role: waypoint scanRaw role: coverage_scan_observe
Theta: target_facing_base_yawHead pitch: target_framing_head_pitchRoom: same room (room_6 -> room_6)
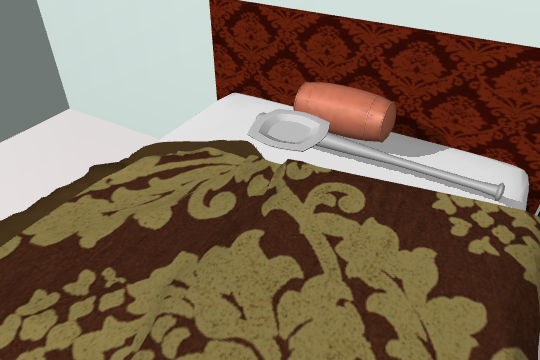
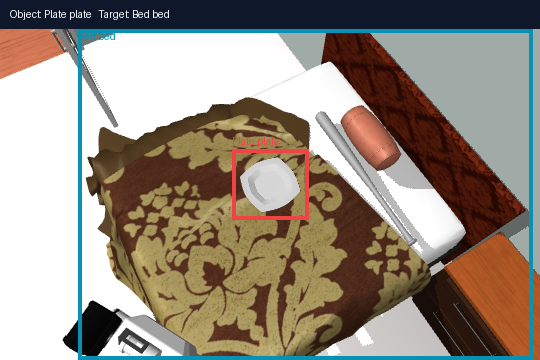
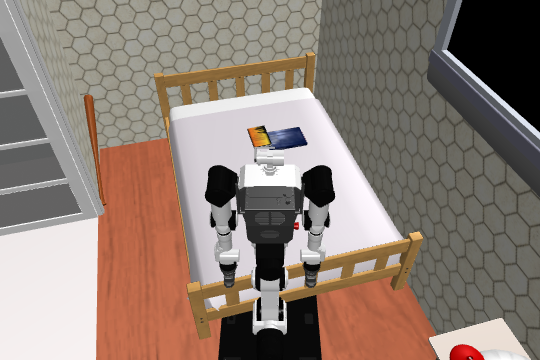
18. navigate_to_object observed_002
x=10.301889 y=7.09524 theta=-2.617994 head_pitch=0.415496
Subphase: navRole: objectRaw phase: navigate_to_object
Handle: observed_002Object: Plate plateTarget: Bed bedFocus provenance: public_mujoco_state_report_aid
Theta: target_facing_base_yawHead pitch: target_framing_head_pitchRoom: same room (room_6 -> room_6)FPV visibility: object 3077 px, target 82723 pxVerify visibility: object 2306 px, target 109001 px
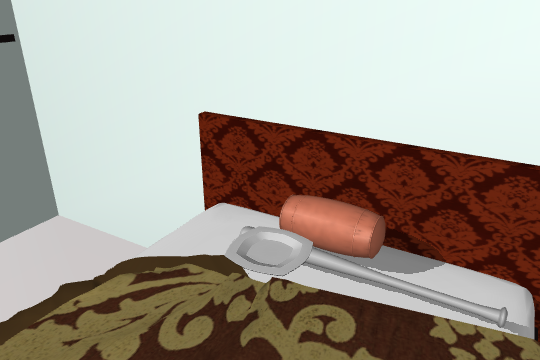
19. pick observed_002
x=10.301889 y=7.09524 theta=-2.617994 head_pitch=0.415496
Subphase: pickRole: objectRaw phase: pick
Handle: observed_002Object: Plate plateTarget: Bed bedFocus provenance: public_mujoco_state_report_aid
Theta: target_facing_base_yawHead pitch: target_framing_head_pitchRoom: same room (room_6 -> room_6)FPV visibility: object 5955 px, target 78905 pxVerify visibility: object 2306 px, target 83058 px
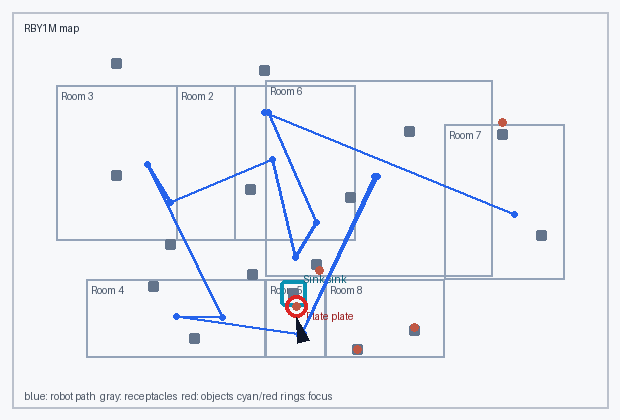
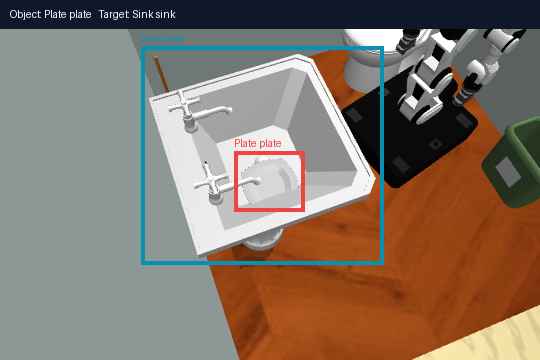
20. navigate_to_receptacle sink_07e796f32d0d3efce9acf4be00f3bc53_1_0_5
x=7.703332 y=2.773295 theta=1.832596 head_pitch=0.623473
Subphase: navRole: targetRaw phase: navigate_to_receptacle
Object: Plate plateTarget: Sink sinkFocus provenance: public_mujoco_state_report_aid
Theta: target_facing_base_yawHead pitch: target_framing_head_pitchRoom: same room (room_5 -> room_5)FPV visibility: object 6345 px, target 49631 pxVerify visibility: object 2306 px, target 23482 px
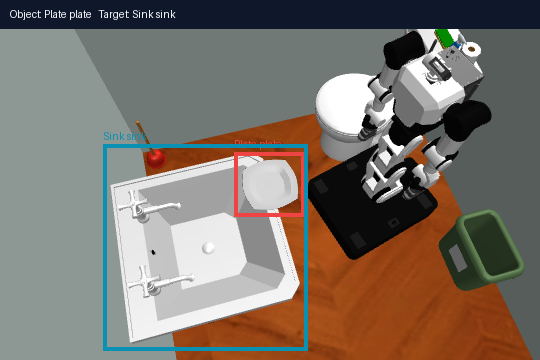
21. place observed_002
x=7.703332 y=2.773295 theta=1.832596 head_pitch=0.623473
Subphase: placeRole: surfaceRaw phase: place
Handle: observed_002Object: Plate plateTarget: Sink sinkFocus provenance: public_mujoco_state_report_aid
Theta: target_facing_base_yawHead pitch: target_framing_head_pitchRoom: same room (room_5 -> room_5)FPV visibility: object 1864 px, target 53997 pxVerify visibility: object 1664 px, target 26585 px
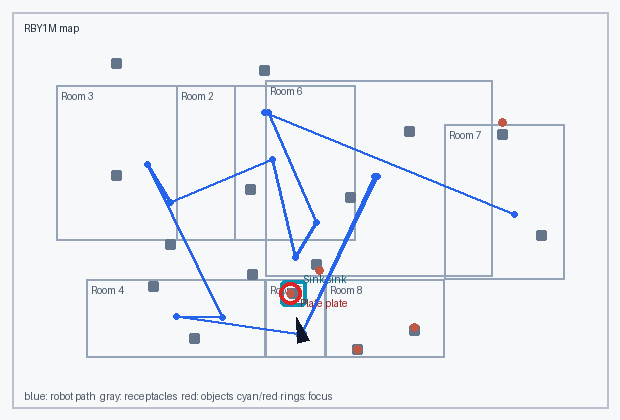
22. observe
x=7.703332 y=2.773295 theta=1.832596 head_pitch=0.623473
Observe role: post-place verificationRaw role: post_place_observe
Theta: target_facing_base_yawHead pitch: target_framing_head_pitchRoom: same room (room_5 -> room_5)
23. observe
x=11.5367 y=7.19325 theta=1.570796 head_pitch=0.712386
Observe role: waypoint scanRaw role: coverage_scan_observe
Theta: target_facing_base_yawHead pitch: target_framing_head_pitchRoom: same room (room_6 -> room_6)
24. observe
x=15.298371 y=6.05818 theta=-0.523599 head_pitch=0.659569
Observe role: waypoint scanRaw role: coverage_scan_observe
Theta: target_facing_base_yawHead pitch: target_framing_head_pitchRoom: same room (room_7 -> room_7)
25. observe
x=14.8832 y=7.10204 theta=1.570796 head_pitch=0.703784
Observe role: waypoint scanRaw role: coverage_scan_observe
Theta: target_facing_base_yawHead pitch: target_framing_head_pitchRoom: same room (room_7 -> room_7)
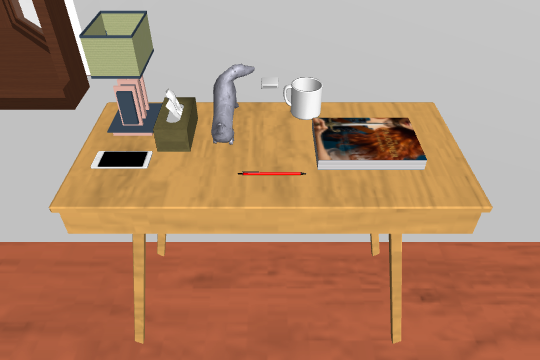
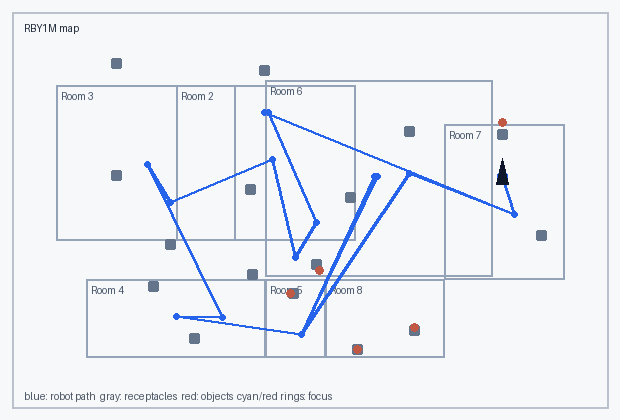
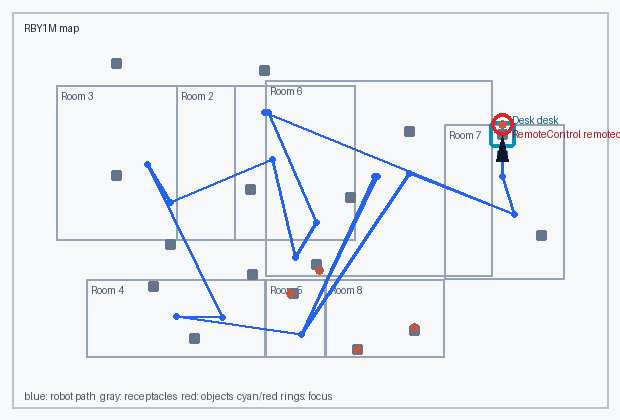
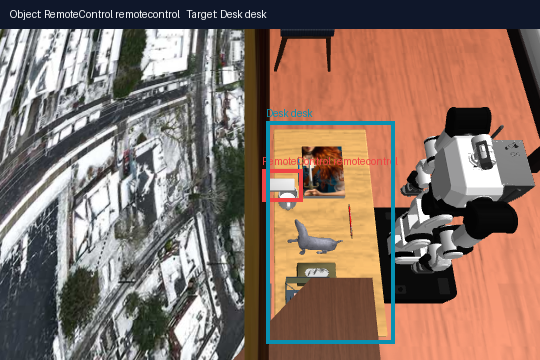
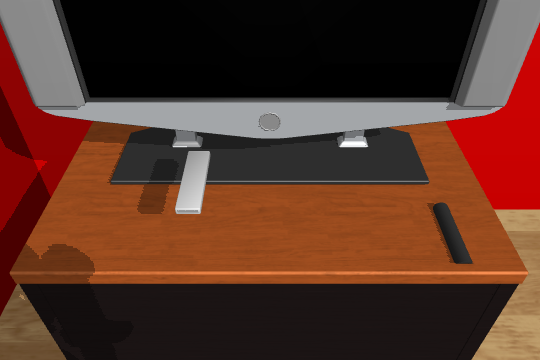
26. navigate_to_object observed_003
x=14.8832 y=7.74204 theta=1.570796 head_pitch=0.554225
Subphase: navRole: objectRaw phase: navigate_to_object
Handle: observed_003Object: RemoteControl remotecontrolTarget: Desk deskFocus provenance: public_mujoco_state_report_aid
Theta: target_facing_base_yawHead pitch: target_framing_head_pitchRoom: same room (room_7 -> room_7)FPV visibility: object 594 px, target 15662 pxVerify visibility: object 454 px, target 179 px
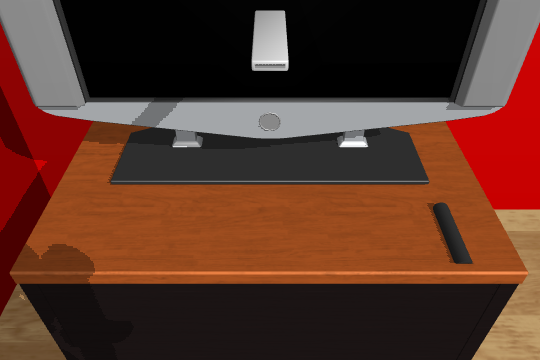
27. pick observed_003
x=14.8832 y=7.74204 theta=1.570796 head_pitch=0.554225
Subphase: pickRole: objectRaw phase: pick
Handle: observed_003Object: RemoteControl remotecontrolTarget: Desk deskFocus provenance: public_mujoco_state_report_aid
Theta: target_facing_base_yawHead pitch: target_framing_head_pitchRoom: same room (room_7 -> room_7)FPV visibility: object 1234 px, target 15662 pxVerify visibility: object 324 px, target 11653 px
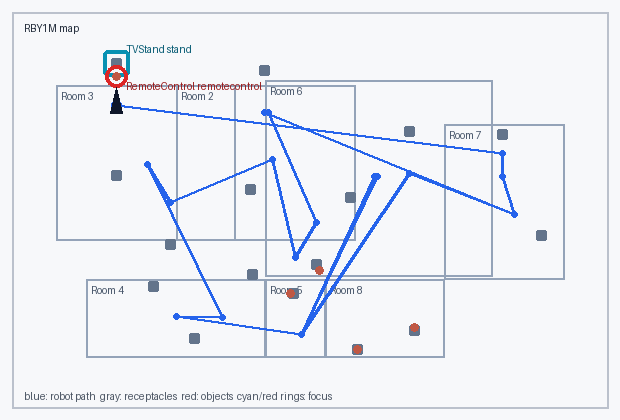
28. navigate_to_receptacle stand_6bc09b7e2670723819cfaf03855284c1_1_0_3
x=1.05963 y=9.0581 theta=1.570796 head_pitch=0.714786
Subphase: navRole: targetRaw phase: navigate_to_receptacle
Object: RemoteControl remotecontrolTarget: TVStand standFocus provenance: public_mujoco_state_report_aid
Theta: target_facing_base_yawHead pitch: target_framing_head_pitchRoom: same room (room_3 -> room_3)FPV visibility: object 2094 px, target 86532 pxVerify visibility: object 648 px, target 25856 px
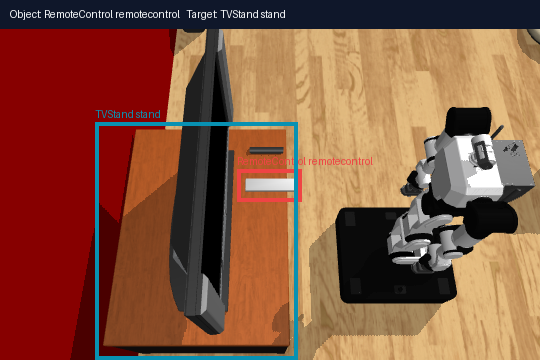
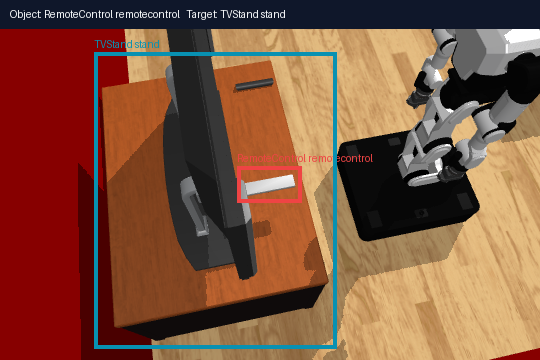
29. place observed_003
x=1.05963 y=9.0581 theta=1.570796 head_pitch=0.714786
Subphase: placeRole: surfaceRaw phase: place
Handle: observed_003Object: RemoteControl remotecontrolTarget: TVStand standFocus provenance: public_mujoco_state_report_aid
Theta: target_facing_base_yawHead pitch: target_framing_head_pitchRoom: same room (room_3 -> room_3)FPV visibility: object 1569 px, target 85752 pxVerify visibility: object 642 px, target 35297 px
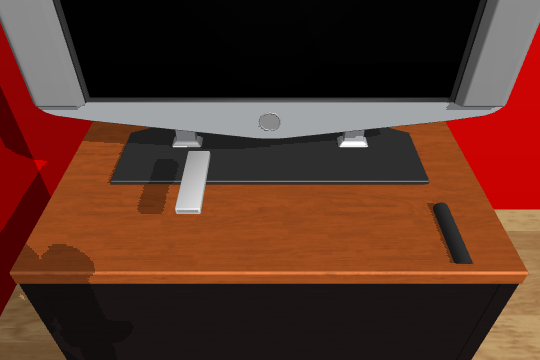
30. observe
x=1.05963 y=9.0581 theta=1.570796 head_pitch=0.714786
Observe role: post-place verificationRaw role: post_place_observe
Theta: target_facing_base_yawHead pitch: target_framing_head_pitchRoom: same room (room_3 -> room_3)
31. observe
x=10.634185 y=3.179812 theta=-0.261799 head_pitch=0.709866
Observe role: waypoint scanRaw role: coverage_scan_observe
Theta: target_facing_base_yawHead pitch: target_framing_head_pitchRoom: same room (room_8 -> room_8)
32. navigate_to_object observed_004
x=10.634185 y=3.259812 theta=-0.261799 head_pitch=0.506635
Subphase: navRole: objectRaw phase: navigate_to_object
Handle: observed_004Object: Book bookTarget: Bed bedFocus provenance: public_mujoco_state_report_aid
Theta: target_facing_base_yawHead pitch: target_framing_head_pitchRoom: same room (room_8 -> room_8)FPV visibility: object 2172 px, target 70143 pxVerify visibility: object 1479 px, target 110572 px
33. pick observed_004
x=10.634185 y=3.259812 theta=-0.261799 head_pitch=0.506635
Subphase: pickRole: objectRaw phase: pick
Handle: observed_004Object: Book bookTarget: Bed bedFocus provenance: public_mujoco_state_report_aid
Theta: target_facing_base_yawHead pitch: target_framing_head_pitchRoom: same room (room_8 -> room_8)FPV visibility: object 4714 px, target 69405 pxVerify visibility: object 1479 px, target 67623 px
34. navigate_to_receptacle shelf_140ccb7e1f5028c7d773229dfe6e1a04_1_0_2
x=5.94118 y=5.56598 theta=-1.570796 head_pitch=0.635116
Subphase: navRole: targetRaw phase: navigate_to_receptacle
Object: Book bookTarget: ShelvingUnit shelfFocus provenance: public_mujoco_state_report_aid
Theta: target_facing_base_yawHead pitch: target_framing_head_pitchRoom: same room (room_2 -> room_2)FPV visibility: object 5429 px, target 55641 pxVerify visibility: object 1483 px, target 10949 px
35. place_inside observed_004
x=5.94118 y=5.56598 theta=-1.570796 head_pitch=0.635116
Subphase: placeRole: insideRaw phase: place_inside
Handle: observed_004Object: Book bookTarget: ShelvingUnit shelfFocus provenance: public_mujoco_state_report_aid
Theta: target_facing_base_yawHead pitch: target_framing_head_pitchRoom: same room (room_2 -> room_2)FPV visibility: object 2476 px, target 54958 pxVerify visibility: object 244 px, target 12459 px
36. observe
x=5.94118 y=5.56598 theta=-1.570796 head_pitch=0.635116
Observe role: post-place verificationRaw role: post_place_observe
Theta: target_facing_base_yawHead pitch: target_framing_head_pitchRoom: same room (room_2 -> room_2)
37. observe
x=10.513463 y=3.176163 theta=-2.356194 head_pitch=0.705569
Observe role: waypoint scanRaw role: coverage_scan_observe
Theta: target_facing_base_yawHead pitch: target_framing_head_pitchRoom: same room (room_8 -> room_8)
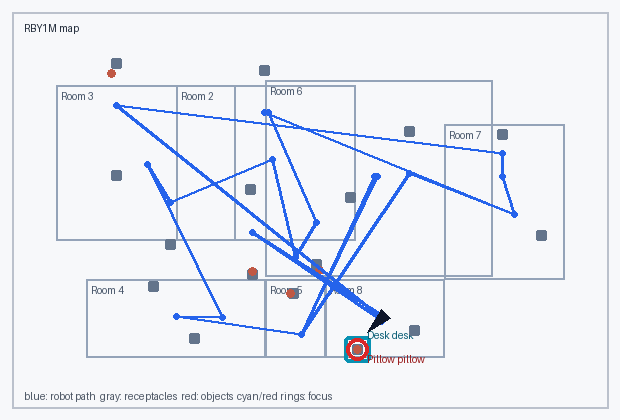
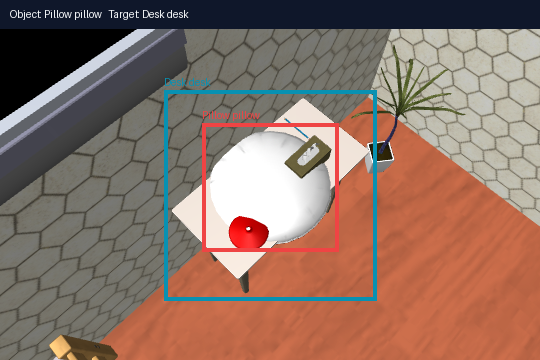
38. navigate_to_object observed_005
x=10.513463 y=3.176163 theta=-2.356194 head_pitch=0.500926
Subphase: navRole: objectRaw phase: navigate_to_object
Handle: observed_005Object: Pillow pillowTarget: Desk deskFocus provenance: public_mujoco_state_report_aid
Theta: target_facing_base_yawHead pitch: target_framing_head_pitchRoom: same room (room_8 -> room_8)FPV visibility: object 13020 px, target 12800 pxVerify visibility: object 9124 px, target 6609 px
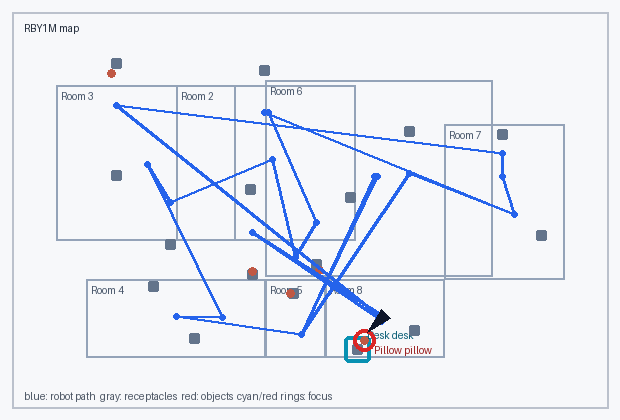
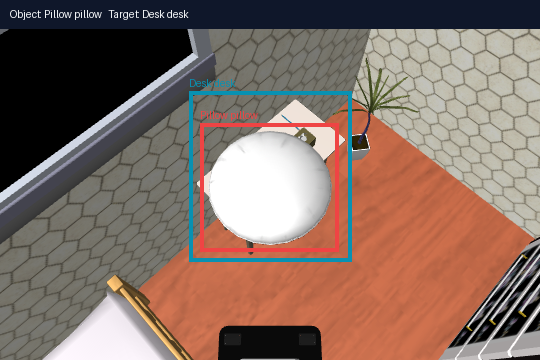
39. pick observed_005
x=10.513463 y=3.176163 theta=-2.356194 head_pitch=0.500926
Subphase: pickRole: objectRaw phase: pick
Handle: observed_005Object: Pillow pillowTarget: Desk deskFocus provenance: public_mujoco_state_report_aid
Theta: target_facing_base_yawHead pitch: target_framing_head_pitchRoom: same room (room_8 -> room_8)FPV visibility: object 39780 px, target 19071 pxVerify visibility: object 10951 px, target 2148 px
40. navigate_to_receptacle bed_8f5567bbd792fad0b4ee3c2ca65e25b0_1_0_6
x=10.421889 y=7.09524 theta=-2.617994 head_pitch=0.640633
Subphase: navRole: targetRaw phase: navigate_to_receptacle
Object: Pillow pillowTarget: Bed bedFocus provenance: public_mujoco_state_report_aid
Theta: target_facing_base_yawHead pitch: target_framing_head_pitchRoom: same room (room_6 -> room_6)FPV visibility: object 42465 px, target 118136 pxVerify visibility: object 10953 px, target 75606 px
41. place observed_005
x=10.421889 y=7.09524 theta=-2.617994 head_pitch=0.640633
Subphase: placeRole: surfaceRaw phase: place
Handle: observed_005Object: Pillow pillowTarget: Bed bedFocus provenance: public_mujoco_state_report_aid
Theta: target_facing_base_yawHead pitch: target_framing_head_pitchRoom: same room (room_6 -> room_6)FPV visibility: object 16571 px, target 130489 pxVerify visibility: object 10953 px, target 101764 px
42. observe
x=10.421889 y=7.09524 theta=-2.617994 head_pitch=0.640633
Observe role: post-place verificationRaw role: post_place_observe
Theta: target_facing_base_yawHead pitch: target_framing_head_pitchRoom: same room (room_6 -> room_6)
43. after
x=10.421889 y=7.09524 theta=-2.617994 head_pitch=0.640633
Theta: target_facing_base_yawHead pitch: target_framing_head_pitchRoom: same room (room_6 -> room_6)