两个月前那张图
2026-03 · 内部分享摘录
下一步,让 AI 完全接手 这个测试自动化
那张图当时是一个 vision
今天是给大家汇报一下,我们的确做到了,并且把它做成一个抽象拿出来了

图 #1 · 2026-03 内部分享摘录 · AI 接手测试自动化的早期设想
开场钩子,节奏要快。强调不是凭空做了一个工具,而是两个月前内部项目里就已经看到"AI 接手测试自动化"这件事的必要性。今天汇报的是:我们确实把它做出来了,并且从真实项目需求抽成了独立 Roboharness。
真实项目里
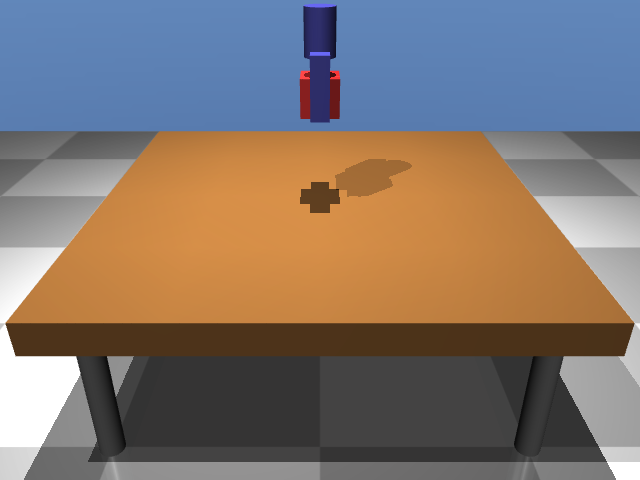
机器人已经能跑起来
Unitree G1 + MuJoCo / MeshCat 对照 · 真实 grasp pipeline 输出
这不是一个模型训练项目
是把已有能力接进 机器人应用栈
是把已有能力接进 机器人应用栈
已有基础
仿真、抓取 pipeline、控制代码都能跑
真正难点
迁移、接入、调参、验证这些工程循环
一旦让 agent 参与长程开发,问题就变成:
它每改一步,谁来判断这一步到底好不好
真实项目输出 · G1 grasp · MeshCat / MuJoCo 对照
这里先给真实效果,不急着解释细节。重点是校准听众预期:这不是训练模型,我们做的是机器人应用和部署相关的工程接入。系统不是停在"完全跑不起来",而是停在"agent 可以改,但自己不知道每一轮改得好不好"。
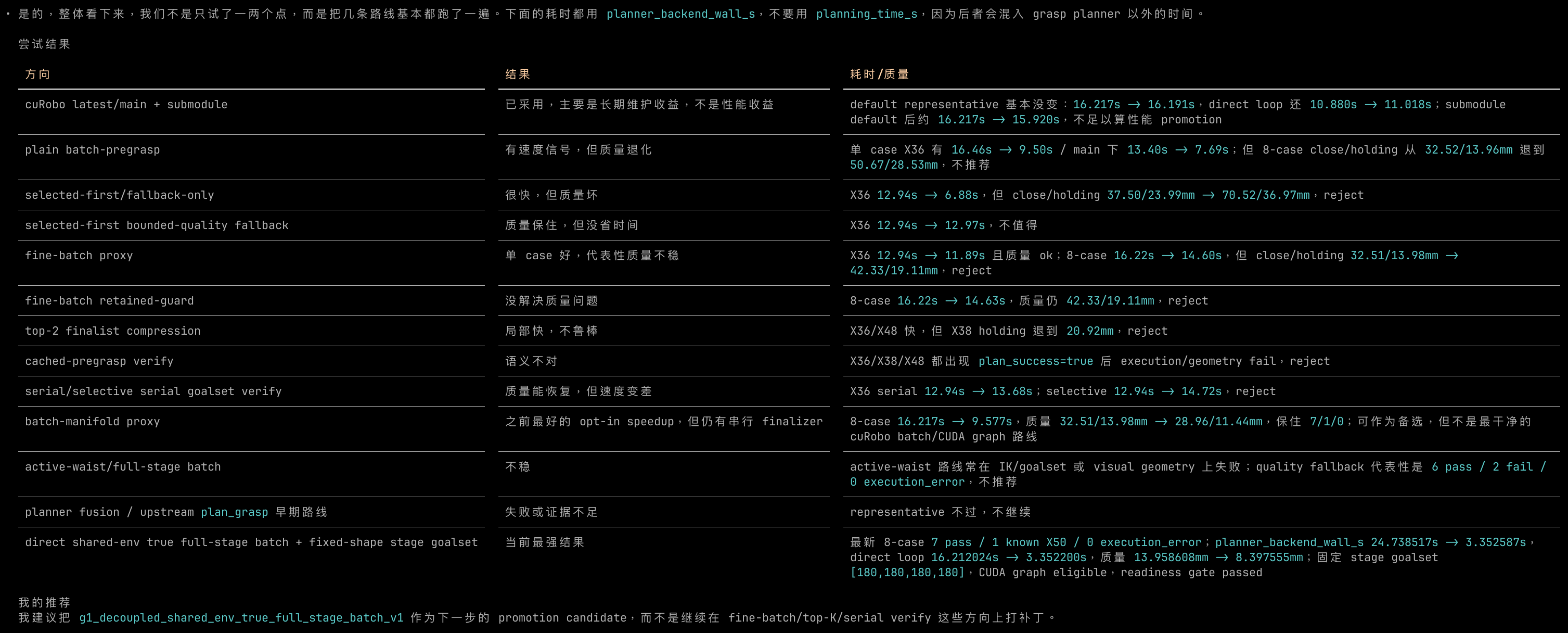
最能暴露问题的一次迁移任务
Decoupled WBC → GEAR-SONIC
不是训练新模型,是把 NVIDIA GR00T WBC 里的基础模型 / 控制方案接进我们的应用栈
before
Decoupled WBC
下肢 RL + 上肢 IK 的混合架构
局部模块能各自调通
局部模块能各自调通
after
GEAR-SONIC
单一 Transformer 基础模型
接口、状态、验证逻辑都要重新对齐
接口、状态、验证逻辑都要重新对齐
workload
长程工程任务
改控制栈 · 跑仿真 · 看 artifact · 修判据
不是一次 prompt 能结束
不是一次 prompt 能结束
关键→
迁移只是最容易讲清楚的一次任务;真正的问题是 agent 长程研发缺少自我验收层
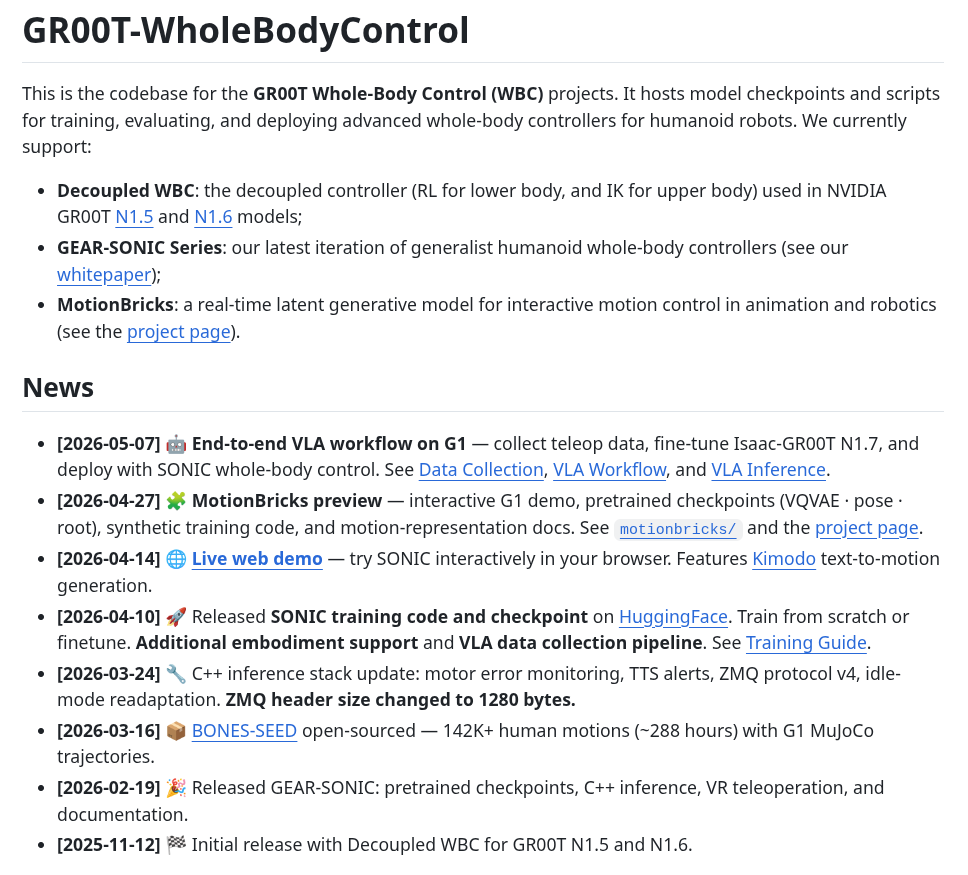
NVIDIA GR00T-WholeBodyControl · 全身控制代码库,包含 Decoupled WBC、GEAR-SONIC、MotionBricks 等控制方案
这里回应试讲反馈:把具体任务讲清楚。强调不涉及训练,是部署和应用栈接入。GR00T-WholeBodyControl 是 NVIDIA 的全身控制代码库,里面包括 Decoupled WBC、GEAR-SONIC、MotionBricks 等控制方案。SONIC 迁移的价值是让问题变尖锐:任务长、验证复杂、单靠人盯每轮不现实。
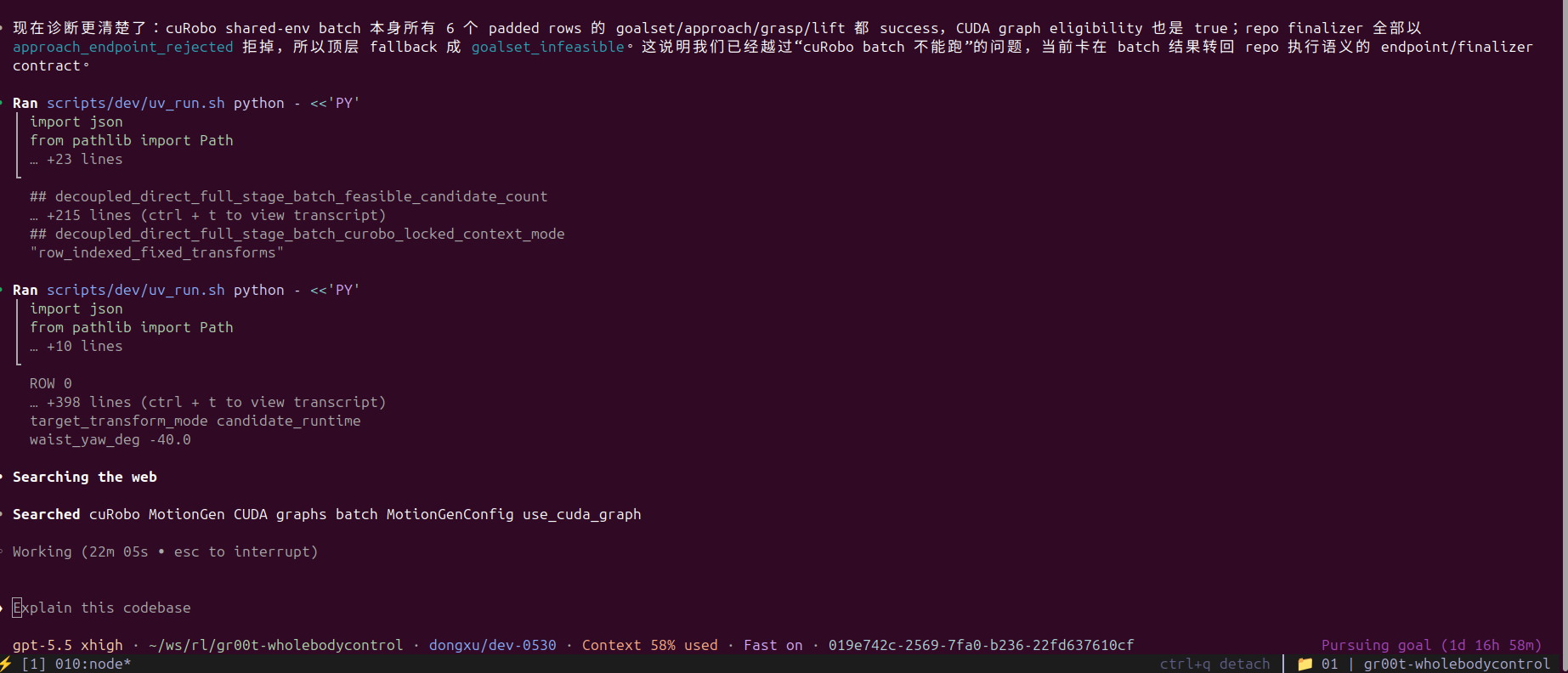
现在的工作流
人定边界,Agent 跑循环,人看证据
phase 01 · 人主导
Plan
拆任务、定边界
每一步成 / 不成 判据先写清楚
每一步成 / 不成 判据先写清楚
phase 02 · Agent 接管
Execute
每改一步自跑 grasp pipeline
收集 metric + 视觉证据
生成 PASS / FAIL proof pack
收集 metric + 视觉证据
生成 PASS / FAIL proof pack
phase 03 · 人回来
Review
先看自动判断
只处理 surfaced case
最后人工 E2E 兜底
只处理 surfaced case
最后人工 E2E 兜底
当前现状:Agent 连续跑,人只看证据和 surfaced case

长程研发任务 · task_01 · Roboharness 把研发任务拆成可跑、可验收的连续步骤
长程研发任务 · task_02 · Agent 基于 evidence loop 推进代码、报告和 review
按现状讲,不讲成概念抽象。真实项目里现在就是这三段:人先定目标和边界,Agent 在边界内连续跑验证,最后人看证据包和 surfaced case,而不是每一轮重新接管。
案例 B · qpos 索引
Roboharness 独立 repo 后的最简 MuJoCo cube grasp 示例
| 证据通道 | 判定 | 解释 |
|---|---|---|
| 视觉 artifact | ✓ lift 看起来成立 | front / side 视角都像抓住并抬起 |
| metric | ✗ false negative | 读错 qpos index,报 cube z=0.0000m |
根因 · _get_cube_z()
- return float(qpos[5]) # assumed cube_z + return float(qpos[2]) # actual cube_z
MuJoCo free joint 在前:qpos[0:3] = cube xyz;slide joints 在 qpos[7:10]
教训方向 —— 判据代码也要被 artifact 反查校准
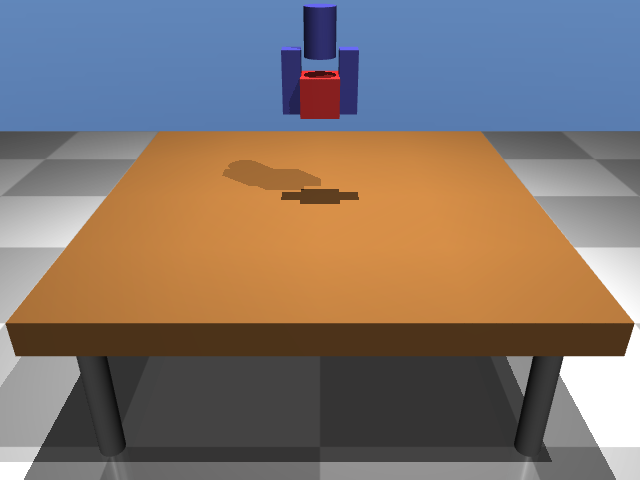
lift · front · step 2600
lift · side · step 2600
独立 repo 最简示例 · 修复前 artifact · front / side 视觉像 PASS;日志:contact OK / ASSERT-SUCCESS FAILED
先划清来源:这个 case 不是 SONIC 迁移里的内部项目,而是 Roboharness 独立成 repo 后,在最简 MuJoCo cube grasp 示例里遇到的。右侧是修复前 parent 23ad3ae 重跑出来的 artifact:只改 ci.yml trigger 和 if: always(),不改业务代码。视觉上 lift/front 和 lift/side 都像抓住并抬起;日志同时显示 gripper-cube contact at lift OK,但 ASSERT-SUCCESS FAILED,cube z=0.0000m,expected >0.2250m。问题不是机器人没抓起来,而是 success metric false negative。根因来自修复 commit 102a593:helper 假设 qpos[5] 是 cube z,实际 MuJoCo free joint 在前,cube z 是 qpos[2]。教训是 metric 判据本身也要被 artifact 和代码审查反查校准。
如果想试这套工作流
从 /goal + intuitive-flow 开始
先让 agent 问清目标、边界和验收,再让它进入长程执行
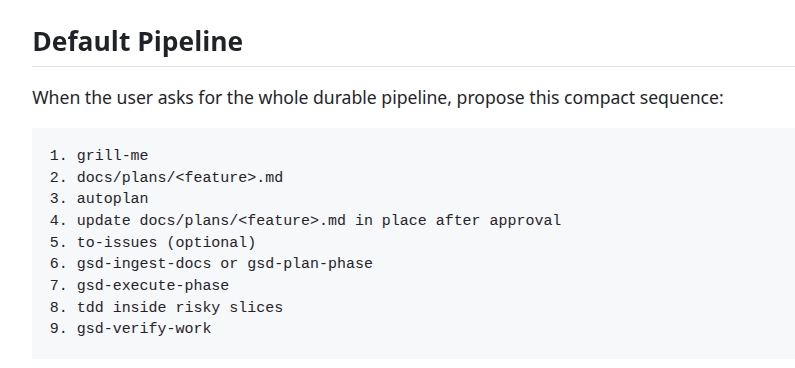
github.com/MiaoDX/intuitive-flow · fuzzy idea → plan → autoplan → GSD → /goal → verification
step 01
把目标写进 /goal
不要只写“帮我做一下”
把 objective、non-goals、done condition 放到同一个入口
把 objective、non-goals、done condition 放到同一个入口
step 02
让 intuitive-flow 先反问
用 grill / office-hours、docs/plans、autoplan、GSD
把模糊想法压成可执行判断
把模糊想法压成可执行判断
step 03
用 proof pack 做 review
人不再逐轮盯过程
而是看 source of truth、运行证据、测试和 surfaced case
而是看 source of truth、运行证据、测试和 surfaced case
这不是新框架
是把我们现在用的长程研发方式,整理成同事也能复用的入口
是把我们现在用的长程研发方式,整理成同事也能复用的入口
这页是给同事的行动入口,不展开成教程。讲法:如果你想把今天这套验收层用到自己的长程研发任务里,不要先从工具名开始,而是先用 /goal 写清目标和完成条件,再让 intuitive-flow 帮你把模糊想法、计划、执行和 proof pack 串起来。
让 Agent 跑得久 —— 不是只靠模型突然变强
是把 每一步怎么验收 这件事做扎实
是把 每一步怎么验收 这件事做扎实
Get ourselves out of the loop
— Q & A —

公众号
直觉机器漫谈
直觉机器漫谈
个人微信
Dongxu-Miao
Dongxu-Miao