start
initial state before meaningful motion
Real public G1 tracking contract running inside the MuJoCo-backed showcase with a 721D prompt-conditioned observation, IMU gyro/history features, and the shipped walking latent context. This page keeps the full charts, playback, and downloadable artifacts.
CMU · Reference/context walking tracking
bfm_zero
Real public G1 tracking contract running inside the MuJoCo-backed showcase with a 721D prompt-conditioned observation, IMU gyro/history features, and the shipped walking latent context.
run.rrd lazily when the viewer enters the viewport.
bfm_zero
bfm_zero
assets/robots/unitree_g1/g1_29dof.xml
[0.000]
Prepared BFM-Zero ONNX checkpoint plus tracking context assets
models/bfm_zero/bfm_zero_g1.onnx
runtime.motion_tokens
[-0.077, -0.026, 0.022, 0.345, 0.278, 0.011, ...]
[-0.109, -0.287, 0.334, 1.013, 1.993, -0.996, ...]
Rerun recording · JSON summary · run log · Proof-pack manifest · configs/bfm_zero_g1.toml
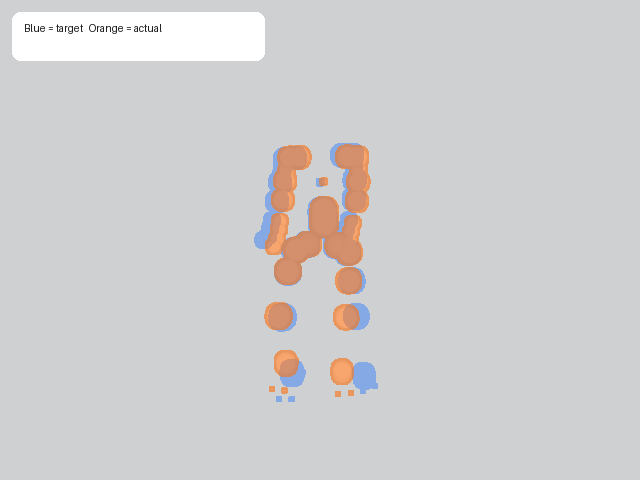
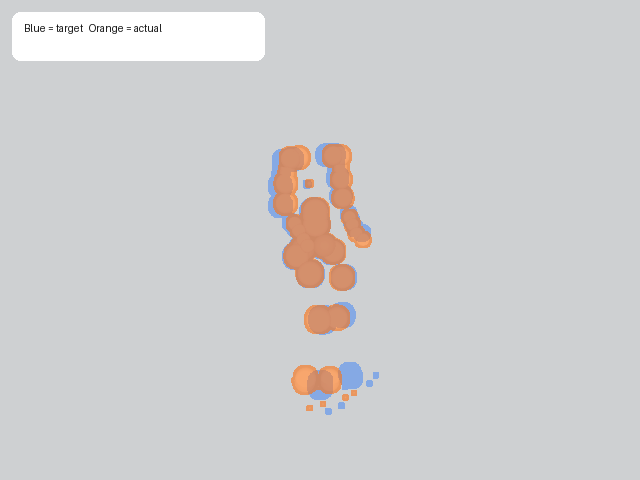
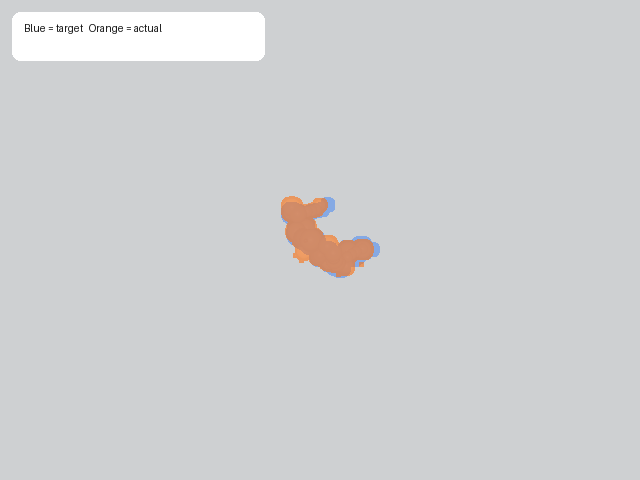
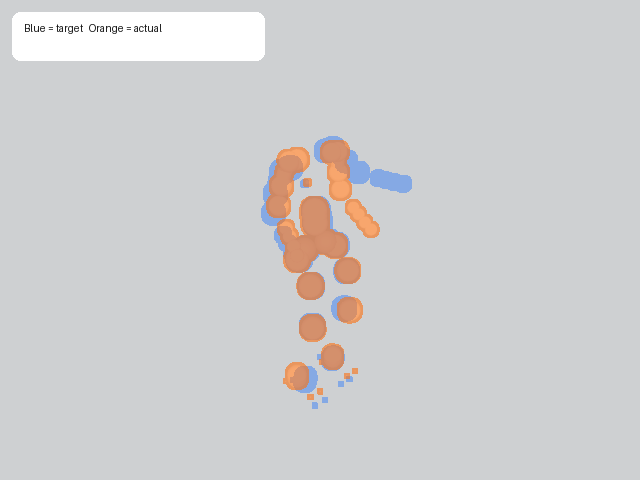
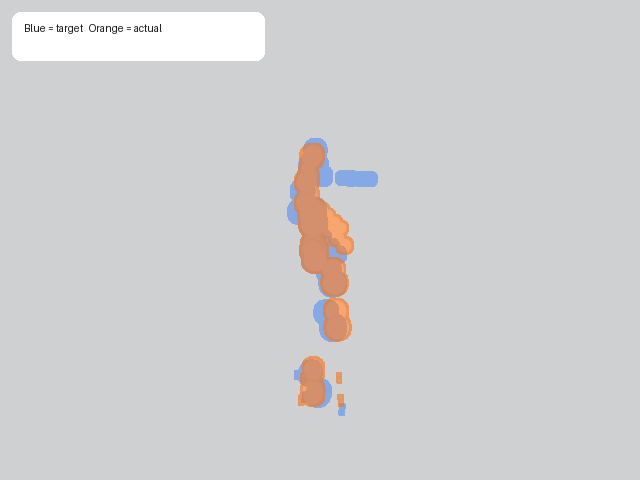
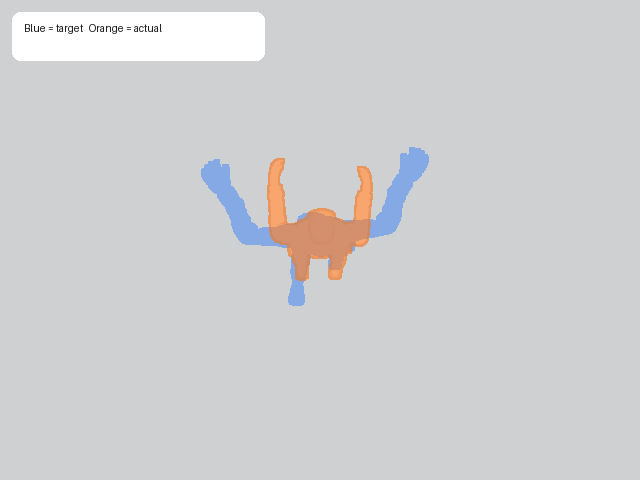
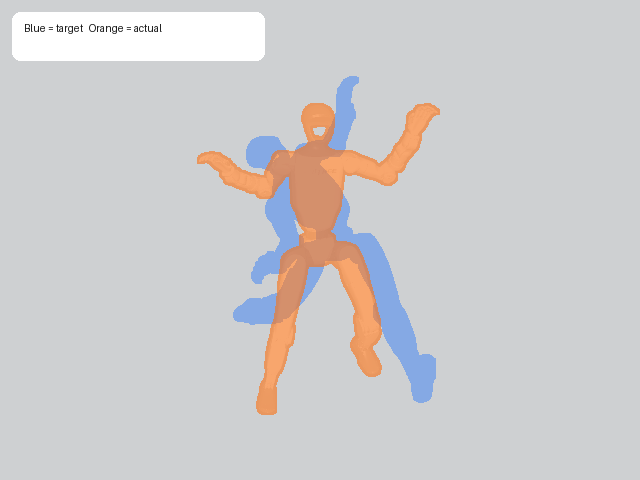
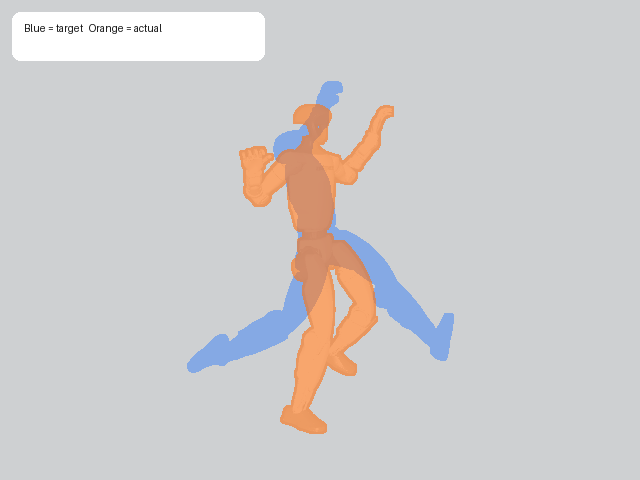
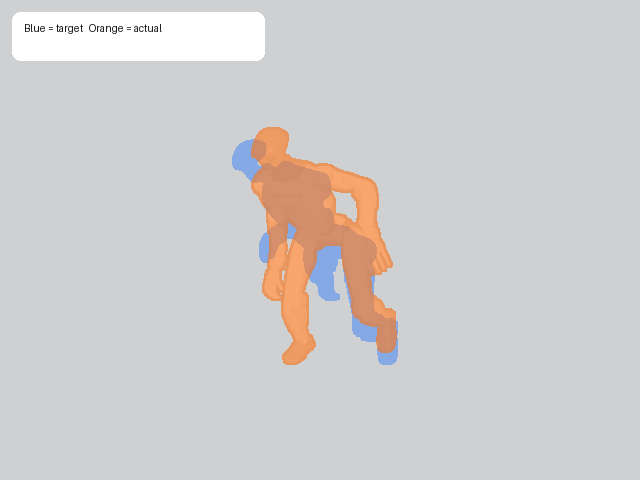
Each image overlays the target pose in blue against the actual replayed pose in orange. The checkpoints are selected from the replay trace so you can cross-check startup, motion onset, peak latency, furthest progress, and final state without opening a second report.
initial state before meaningful motion
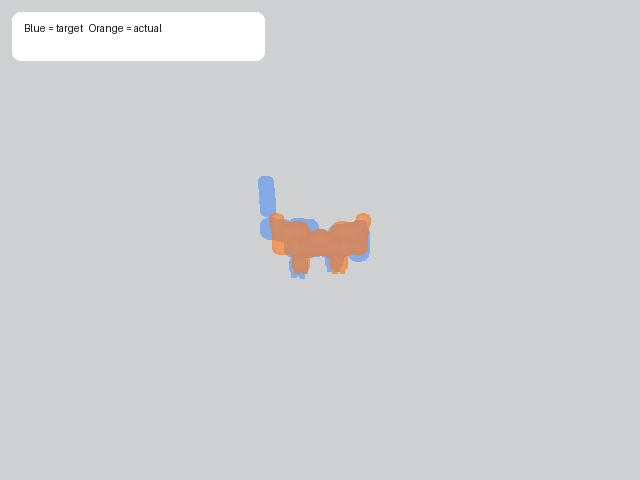
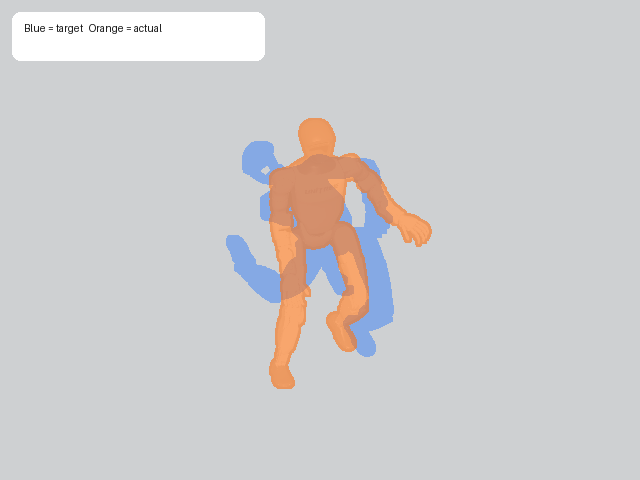
first mean joint delta >= 0.08 rad (0.084 rad)
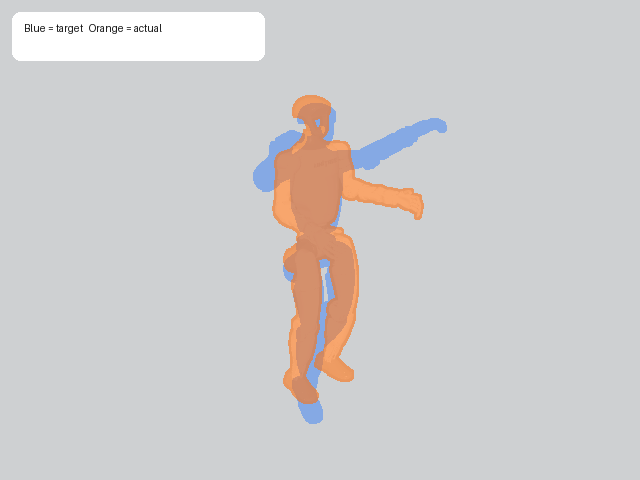
highest inference latency (6.566 ms)
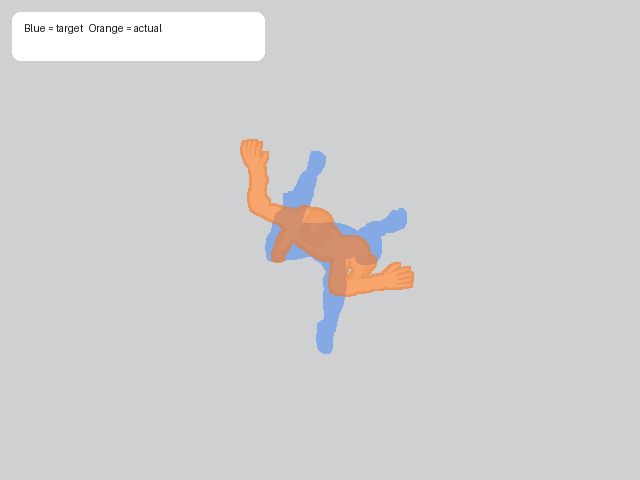
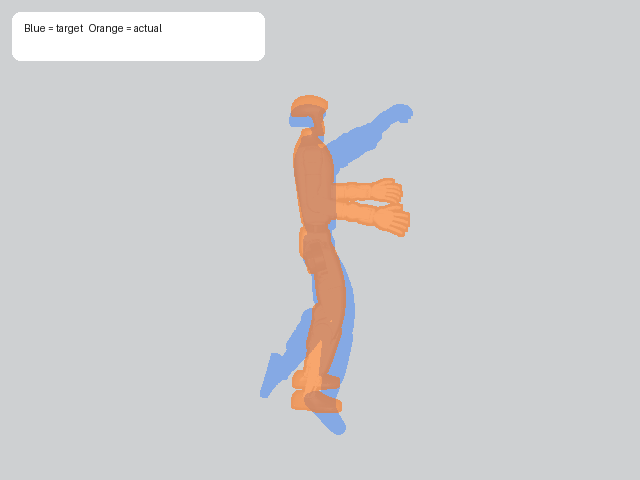
largest planar displacement from start (0.868 m)
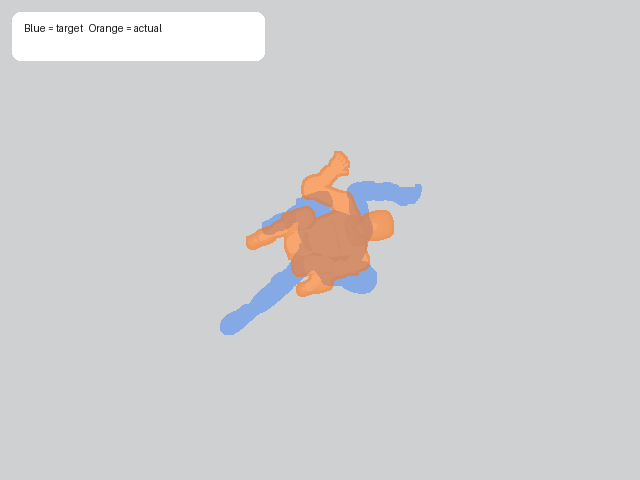
final recorded simulator state