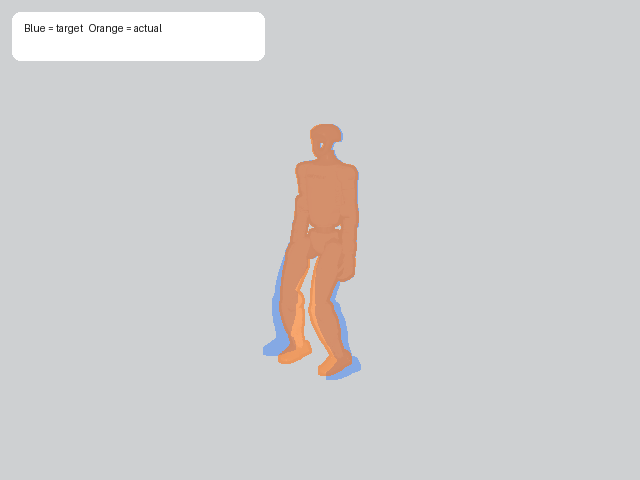
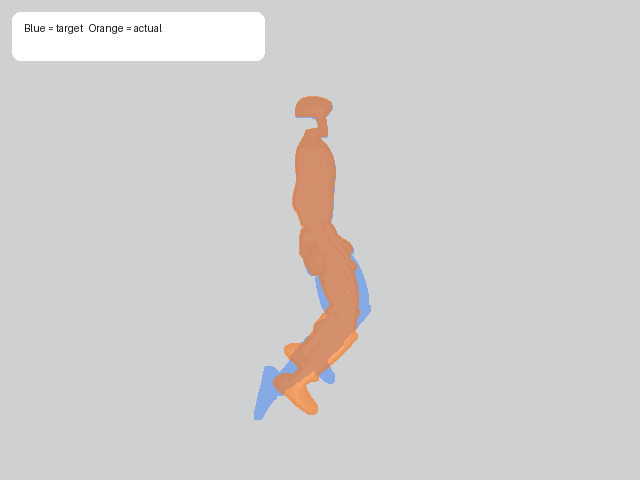
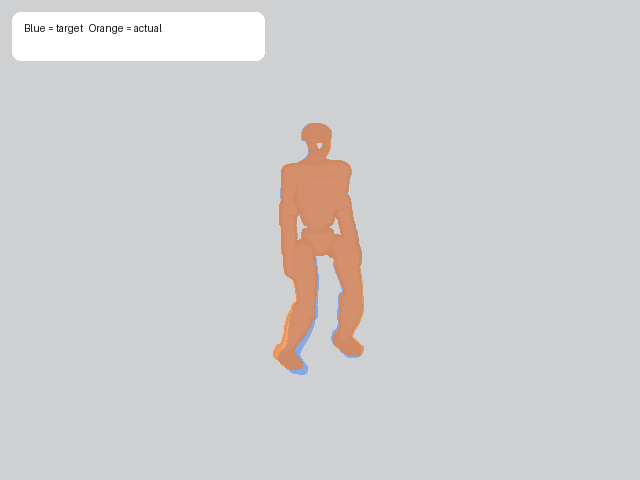
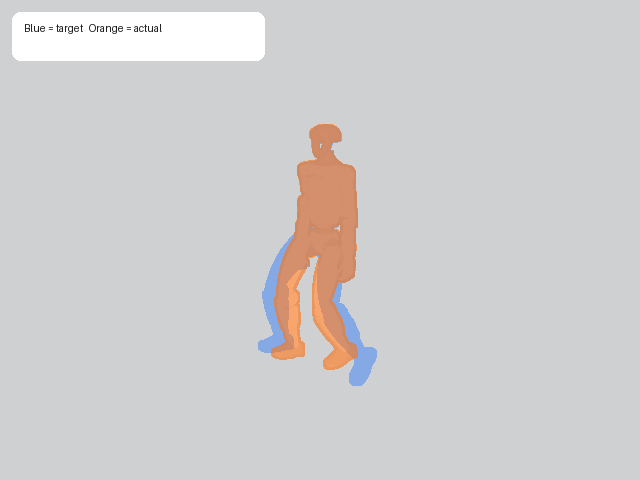
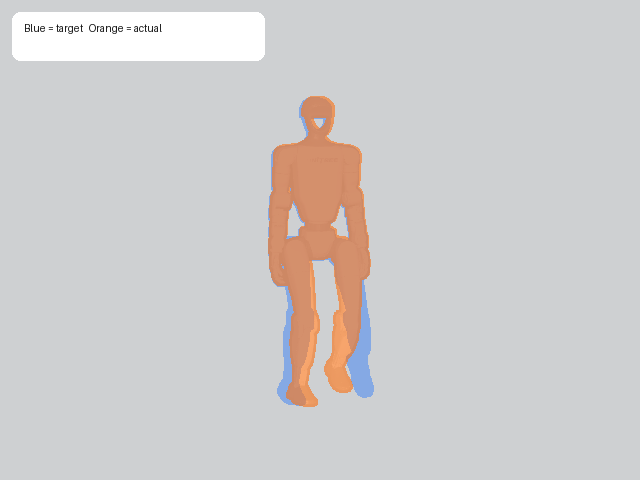
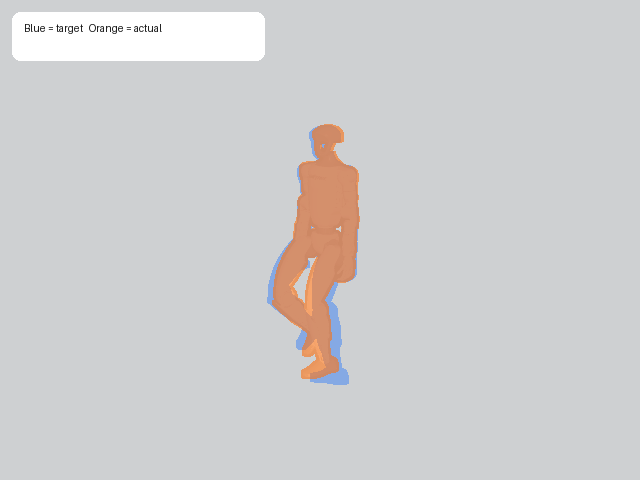
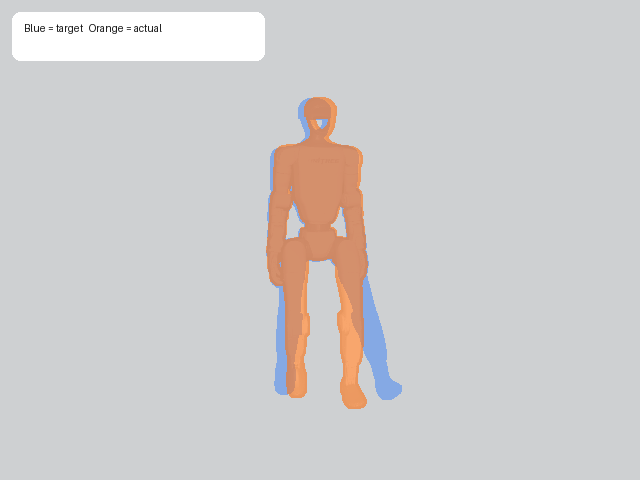
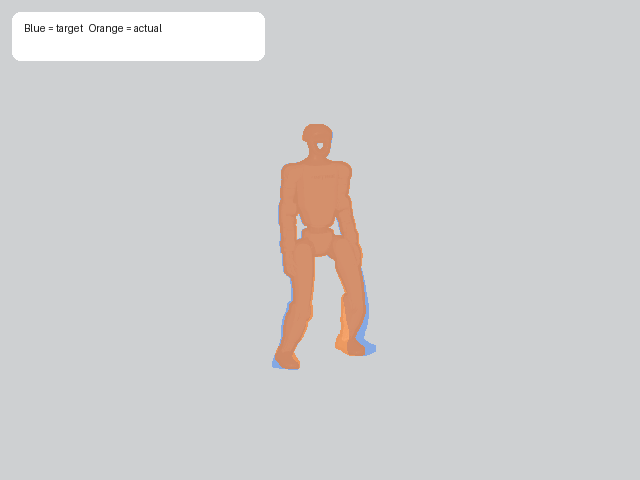
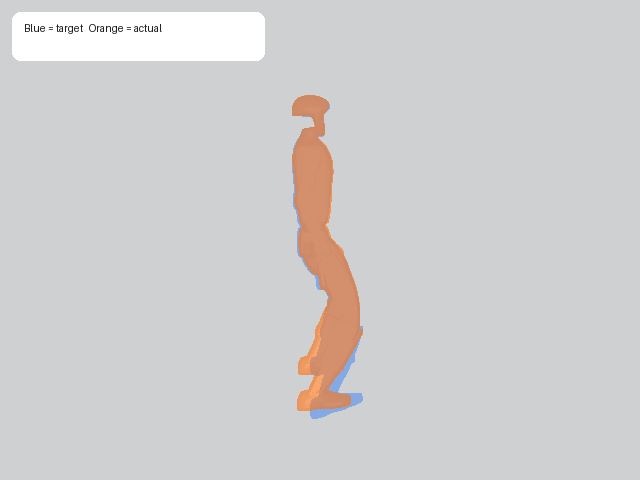
stand
ticks 0–49 · midpoint 24 · 50 ticks / 1.00 s
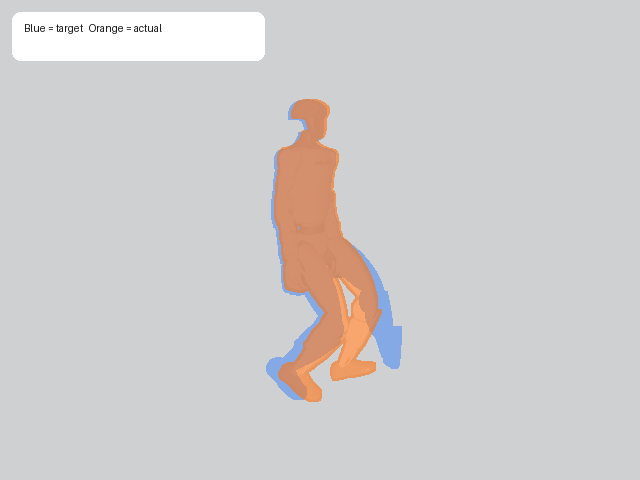
Real public G1 checkpoint using the published recurrent history tensors and lower-body target mapping, driven by the staged velocity-tracking script rather than a single constant command. This page keeps the full charts, playback, and downloadable artifacts.
NVIDIA Isaac · Published G1 locomotion checkpoint on the public 29-DOF embodiment
wbc_agile
Real public G1 checkpoint using the published recurrent history tensors and lower-body target mapping, driven by the staged velocity-tracking script rather than a single constant command.
run.rrd lazily when the viewer enters the viewport.
wbc_agile
wbc_agile
assets/robots/unitree_g1/g1_29dof.xml
[1.000, 0.000, 0.000, 0.000, 0.000, 0.000, ...]
Published NVIDIA Isaac G1 ONNX checkpoint
models/wbc-agile/unitree_g1_velocity_e2e.onnx
runtime.velocity_schedule
[-0.194, 0.085, -0.032, 0.416, -0.487, -0.211, ...]
[-0.454, 0.164, -0.074, 0.741, -0.331, 0.119, ...]
Rerun recording · JSON summary · run log · Proof-pack manifest · configs/showcase/wbc_agile_real.toml
The proof pack follows the authored phase timeline directly, so the staged locomotion story reads as stand → accelerate → turn → run → settle instead of generic checkpoint archaeology.
ticks 0–49 · midpoint 24 · 50 ticks / 1.00 s
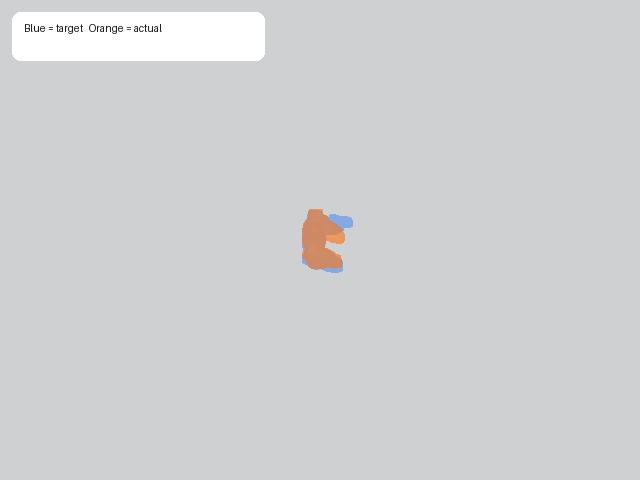
ticks 50–149 · midpoint 99 · 100 ticks / 2.00 s
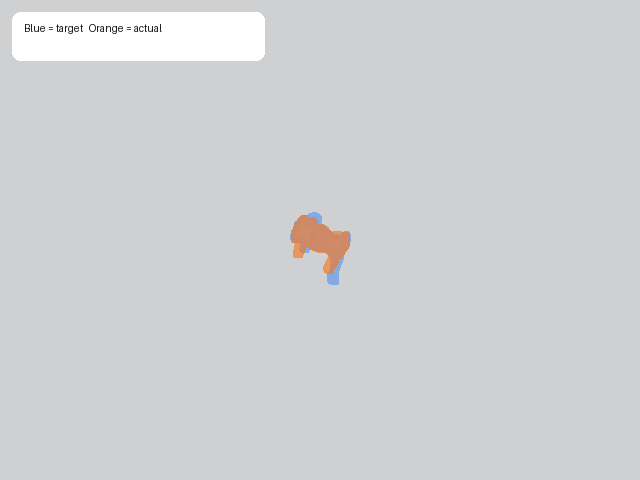
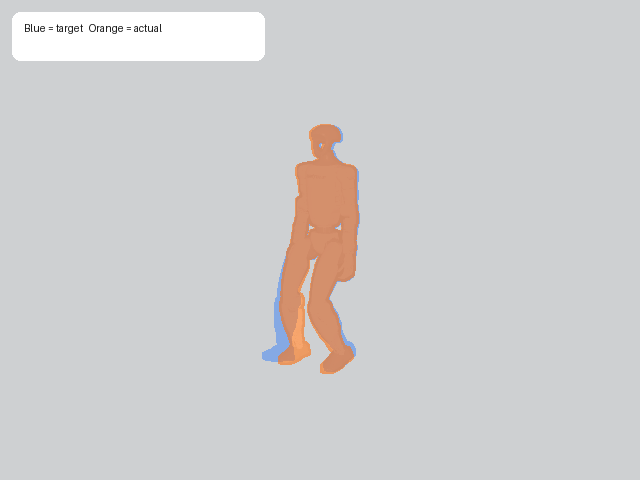
ticks 150–199 · midpoint 174 · 50 ticks / 1.00 s
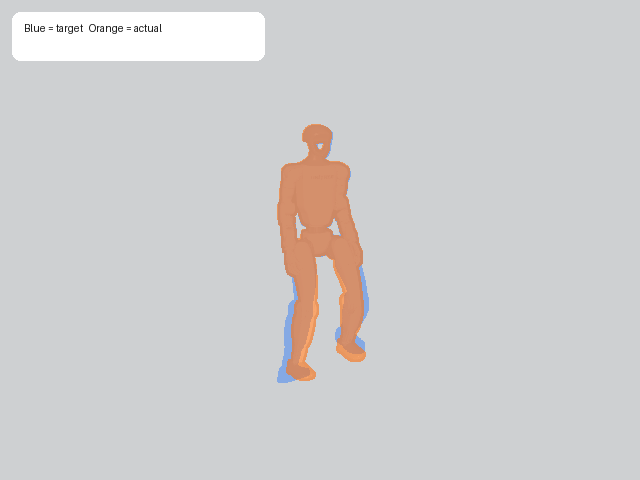
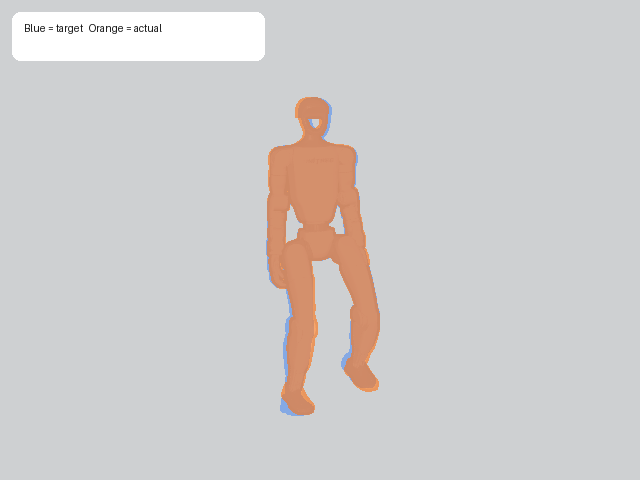
ticks 200–349 · midpoint 274 · 150 ticks / 3.00 s
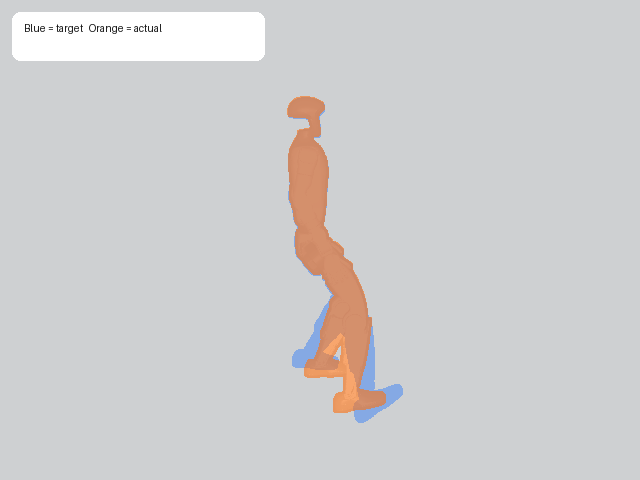
ticks 350–399 · midpoint 374 · 50 ticks / 1.00 s
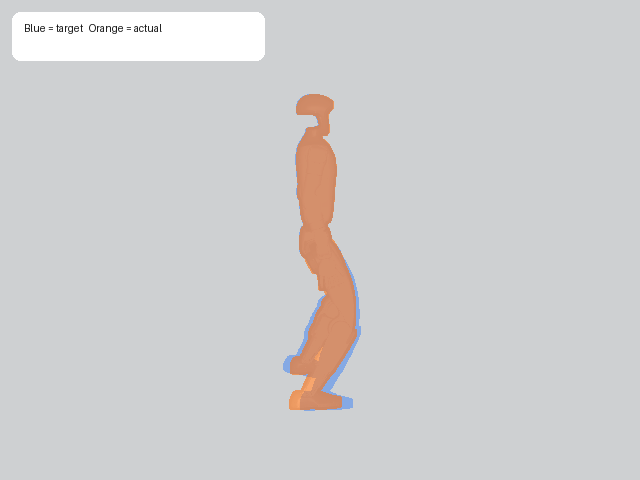
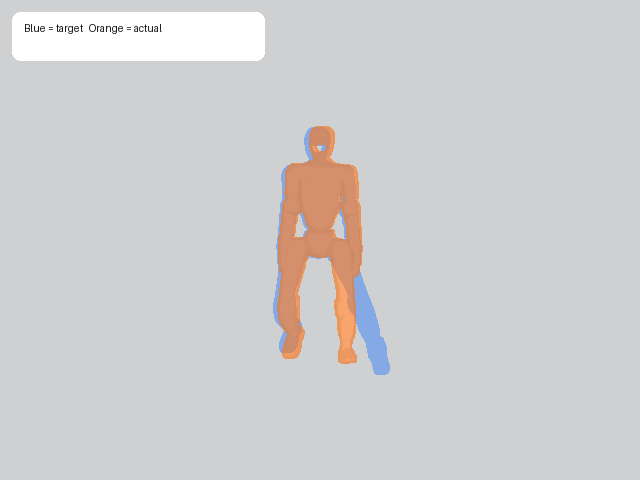
Midpoint capture at tick 24; phase-end review anchored at tick 49.
Static tick and asset-path contract for manual debugging without driving the browser controls.
{
"actual_variants": [
{
"cameras": [
"track",
"side",
"top"
],
"frame_index": 49,
"frame_source": "canonical_replay_trace",
"lag_ms": 0.0,
"lag_ticks": 0,
"relative_dir": "roboharness_run/trial_001/stand_end_tick_0049/lag_0",
"selection_reason": "stand phase end actual response at +0 ticks",
"sim_time_secs": 0.9800000000000008,
"tick": 49
},
{
"cameras": [
"track",
"side",
"top"
],
"frame_index": 50,
"frame_source": "canonical_replay_trace",
"lag_ms": 20.0,
"lag_ticks": 1,
"relative_dir": "roboharness_run/trial_001/stand_end_tick_0049/lag_1",
"selection_reason": "stand phase end actual response at +1 ticks",
"sim_time_secs": 1.0000000000000007,
"tick": 50
},
{
"cameras": [
"track",
"side",
"top"
],
"frame_index": 51,
"frame_source": "canonical_replay_trace",
"lag_ms": 40.0,
"lag_ticks": 2,
"relative_dir": "roboharness_run/trial_001/stand_end_tick_0049/lag_2",
"selection_reason": "stand phase end actual response at +2 ticks",
"sim_time_secs": 1.0200000000000007,
"tick": 51
},
{
"cameras": [
"track",
"side",
"top"
],
"frame_index": 52,
"frame_source": "canonical_replay_trace",
"lag_ms": 60.0,
"lag_ticks": 3,
"relative_dir": "roboharness_run/trial_001/stand_end_tick_0049/lag_3",
"selection_reason": "stand phase end actual response at +3 ticks",
"sim_time_secs": 1.0400000000000007,
"tick": 52
},
{
"cameras": [
"track",
"side",
"top"
],
"frame_index": 53,
"frame_source": "canonical_replay_trace",
"lag_ms": 80.0,
"lag_ticks": 4,
"relative_dir": "roboharness_run/trial_001/stand_end_tick_0049/lag_4",
"selection_reason": "stand phase end actual response at +4 ticks",
"sim_time_secs": 1.0600000000000007,
"tick": 53
},
{
"cameras": [
"track",
"side",
"top"
],
"frame_index": 54,
"frame_source": "canonical_replay_trace",
"lag_ms": 100.0,
"lag_ticks": 5,
"relative_dir": "roboharness_run/trial_001/stand_end_tick_0049/lag_5",
"selection_reason": "stand phase end actual response at +5 ticks",
"sim_time_secs": 1.0800000000000007,
"tick": 54
}
],
"default_review": {
"actual_frame_index": 52,
"actual_lag_ms": 60.0,
"actual_lag_ticks": 3,
"actual_relative_dir": "roboharness_run/trial_001/stand_end_tick_0049/lag_3",
"actual_tick": 52,
"target_frame_index": 49,
"target_lag_ms": 0.0,
"target_lag_ticks": 0,
"target_relative_dir": "roboharness_run/trial_001/stand_end_tick_0049/target_lag_0",
"target_tick": 49
},
"midpoint": {
"cameras": [
"track",
"side",
"top"
],
"frame_index": 24,
"frame_source": "canonical_replay_trace",
"lag_ms": 0.0,
"lag_ticks": 0,
"relative_dir": "roboharness_run/trial_001/stand_midpoint_tick_0024",
"selection_reason": "stand midpoint from the explicit phase timeline",
"sim_time_secs": 0.48000000000000037,
"tick": 24
},
"phase_end_anchor": {
"cameras": [
"track",
"side",
"top"
],
"frame_index": 49,
"frame_source": "canonical_replay_trace",
"lag_ms": 0.0,
"lag_ticks": 0,
"phase_end_tick": 49,
"relative_dir": "roboharness_run/trial_001/stand_end_tick_0049/lag_3",
"selection_reason": "stand phase end with positive-lag actual-response review",
"sim_time_secs": 0.9800000000000008,
"tick": 49
},
"phase_name": "stand",
"target_variants": [
{
"cameras": [
"track",
"side",
"top"
],
"frame_index": 49,
"frame_source": "canonical_replay_trace",
"lag_ms": 0.0,
"lag_ticks": 0,
"relative_dir": "roboharness_run/trial_001/stand_end_tick_0049/target_lag_0",
"selection_reason": "stand target pose sampled at +0 ticks from phase end",
"sim_time_secs": 0.9800000000000008,
"tick": 49
},
{
"cameras": [
"track",
"side",
"top"
],
"frame_index": 50,
"frame_source": "canonical_replay_trace",
"lag_ms": 20.0,
"lag_ticks": 1,
"relative_dir": "roboharness_run/trial_001/stand_end_tick_0049/target_lag_1",
"selection_reason": "stand target pose sampled at +1 ticks from phase end",
"sim_time_secs": 1.0000000000000007,
"tick": 50
},
{
"cameras": [
"track",
"side",
"top"
],
"frame_index": 51,
"frame_source": "canonical_replay_trace",
"lag_ms": 40.0,
"lag_ticks": 2,
"relative_dir": "roboharness_run/trial_001/stand_end_tick_0049/target_lag_2",
"selection_reason": "stand target pose sampled at +2 ticks from phase end",
"sim_time_secs": 1.0200000000000007,
"tick": 51
},
{
"cameras": [
"track",
"side",
"top"
],
"frame_index": 52,
"frame_source": "canonical_replay_trace",
"lag_ms": 60.0,
"lag_ticks": 3,
"relative_dir": "roboharness_run/trial_001/stand_end_tick_0049/target_lag_3",
"selection_reason": "stand target pose sampled at +3 ticks from phase end",
"sim_time_secs": 1.0400000000000007,
"tick": 52
},
{
"cameras": [
"track",
"side",
"top"
],
"frame_index": 53,
"frame_source": "canonical_replay_trace",
"lag_ms": 80.0,
"lag_ticks": 4,
"relative_dir": "roboharness_run/trial_001/stand_end_tick_0049/target_lag_4",
"selection_reason": "stand target pose sampled at +4 ticks from phase end",
"sim_time_secs": 1.0600000000000007,
"tick": 53
},
{
"cameras": [
"track",
"side",
"top"
],
"frame_index": 54,
"frame_source": "canonical_replay_trace",
"lag_ms": 100.0,
"lag_ticks": 5,
"relative_dir": "roboharness_run/trial_001/stand_end_tick_0049/target_lag_5",
"selection_reason": "stand target pose sampled at +5 ticks from phase end",
"sim_time_secs": 1.0800000000000007,
"tick": 54
}
],
"timeline": {
"duration_secs": 1.0,
"duration_ticks": 50,
"end_tick": 49,
"midpoint_tick": 24,
"start_tick": 0
}
}
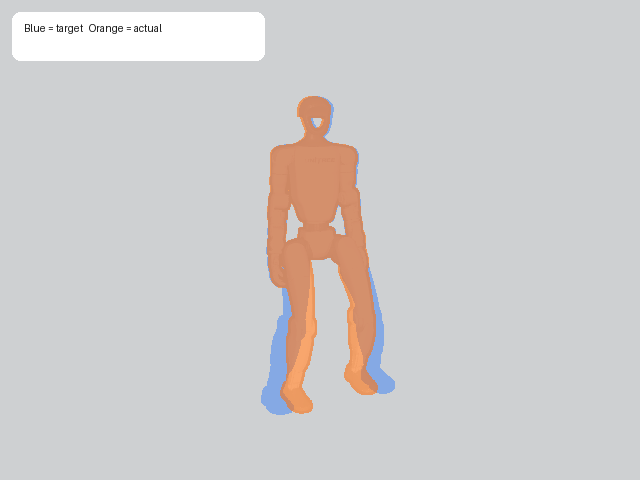
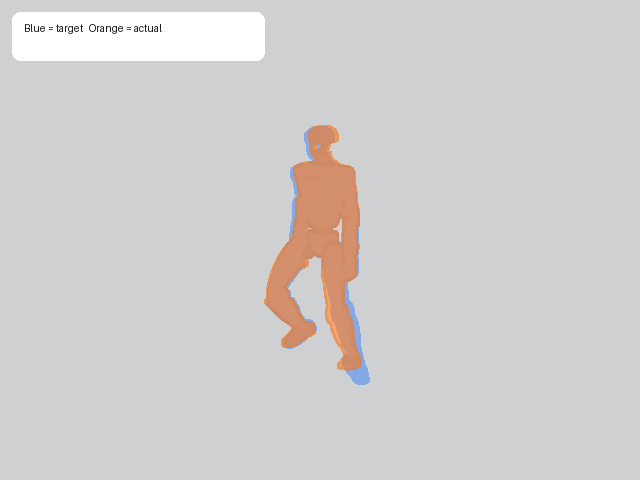
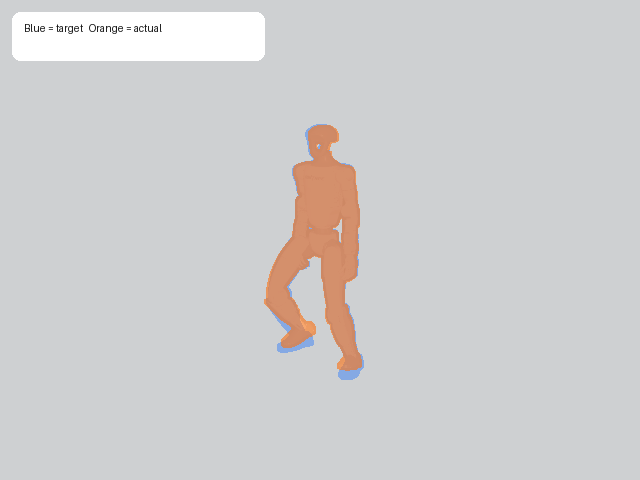
Midpoint capture at tick 99; phase-end review anchored at tick 149.
Static tick and asset-path contract for manual debugging without driving the browser controls.
{
"actual_variants": [
{
"cameras": [
"track",
"side",
"top"
],
"frame_index": 149,
"frame_source": "canonical_replay_trace",
"lag_ms": 0.0,
"lag_ticks": 0,
"relative_dir": "roboharness_run/trial_001/accelerate_end_tick_0149/lag_0",
"selection_reason": "accelerate phase end actual response at +0 ticks",
"sim_time_secs": 2.9799999999998934,
"tick": 149
},
{
"cameras": [
"track",
"side",
"top"
],
"frame_index": 150,
"frame_source": "canonical_replay_trace",
"lag_ms": 20.0,
"lag_ticks": 1,
"relative_dir": "roboharness_run/trial_001/accelerate_end_tick_0149/lag_1",
"selection_reason": "accelerate phase end actual response at +1 ticks",
"sim_time_secs": 2.999999999999891,
"tick": 150
},
{
"cameras": [
"track",
"side",
"top"
],
"frame_index": 151,
"frame_source": "canonical_replay_trace",
"lag_ms": 40.0,
"lag_ticks": 2,
"relative_dir": "roboharness_run/trial_001/accelerate_end_tick_0149/lag_2",
"selection_reason": "accelerate phase end actual response at +2 ticks",
"sim_time_secs": 3.019999999999889,
"tick": 151
},
{
"cameras": [
"track",
"side",
"top"
],
"frame_index": 152,
"frame_source": "canonical_replay_trace",
"lag_ms": 60.0,
"lag_ticks": 3,
"relative_dir": "roboharness_run/trial_001/accelerate_end_tick_0149/lag_3",
"selection_reason": "accelerate phase end actual response at +3 ticks",
"sim_time_secs": 3.039999999999887,
"tick": 152
},
{
"cameras": [
"track",
"side",
"top"
],
"frame_index": 153,
"frame_source": "canonical_replay_trace",
"lag_ms": 80.0,
"lag_ticks": 4,
"relative_dir": "roboharness_run/trial_001/accelerate_end_tick_0149/lag_4",
"selection_reason": "accelerate phase end actual response at +4 ticks",
"sim_time_secs": 3.0599999999998846,
"tick": 153
},
{
"cameras": [
"track",
"side",
"top"
],
"frame_index": 154,
"frame_source": "canonical_replay_trace",
"lag_ms": 100.0,
"lag_ticks": 5,
"relative_dir": "roboharness_run/trial_001/accelerate_end_tick_0149/lag_5",
"selection_reason": "accelerate phase end actual response at +5 ticks",
"sim_time_secs": 3.0799999999998824,
"tick": 154
}
],
"default_review": {
"actual_frame_index": 152,
"actual_lag_ms": 60.0,
"actual_lag_ticks": 3,
"actual_relative_dir": "roboharness_run/trial_001/accelerate_end_tick_0149/lag_3",
"actual_tick": 152,
"target_frame_index": 149,
"target_lag_ms": 0.0,
"target_lag_ticks": 0,
"target_relative_dir": "roboharness_run/trial_001/accelerate_end_tick_0149/target_lag_0",
"target_tick": 149
},
"midpoint": {
"cameras": [
"track",
"side",
"top"
],
"frame_index": 99,
"frame_source": "canonical_replay_trace",
"lag_ms": 0.0,
"lag_ticks": 0,
"relative_dir": "roboharness_run/trial_001/accelerate_midpoint_tick_0099",
"selection_reason": "accelerate midpoint from the explicit phase timeline",
"sim_time_secs": 1.9800000000000015,
"tick": 99
},
"phase_end_anchor": {
"cameras": [
"track",
"side",
"top"
],
"frame_index": 149,
"frame_source": "canonical_replay_trace",
"lag_ms": 0.0,
"lag_ticks": 0,
"phase_end_tick": 149,
"relative_dir": "roboharness_run/trial_001/accelerate_end_tick_0149/lag_3",
"selection_reason": "accelerate phase end with positive-lag actual-response review",
"sim_time_secs": 2.9799999999998934,
"tick": 149
},
"phase_name": "accelerate",
"target_variants": [
{
"cameras": [
"track",
"side",
"top"
],
"frame_index": 149,
"frame_source": "canonical_replay_trace",
"lag_ms": 0.0,
"lag_ticks": 0,
"relative_dir": "roboharness_run/trial_001/accelerate_end_tick_0149/target_lag_0",
"selection_reason": "accelerate target pose sampled at +0 ticks from phase end",
"sim_time_secs": 2.9799999999998934,
"tick": 149
},
{
"cameras": [
"track",
"side",
"top"
],
"frame_index": 150,
"frame_source": "canonical_replay_trace",
"lag_ms": 20.0,
"lag_ticks": 1,
"relative_dir": "roboharness_run/trial_001/accelerate_end_tick_0149/target_lag_1",
"selection_reason": "accelerate target pose sampled at +1 ticks from phase end",
"sim_time_secs": 2.999999999999891,
"tick": 150
},
{
"cameras": [
"track",
"side",
"top"
],
"frame_index": 151,
"frame_source": "canonical_replay_trace",
"lag_ms": 40.0,
"lag_ticks": 2,
"relative_dir": "roboharness_run/trial_001/accelerate_end_tick_0149/target_lag_2",
"selection_reason": "accelerate target pose sampled at +2 ticks from phase end",
"sim_time_secs": 3.019999999999889,
"tick": 151
},
{
"cameras": [
"track",
"side",
"top"
],
"frame_index": 152,
"frame_source": "canonical_replay_trace",
"lag_ms": 60.0,
"lag_ticks": 3,
"relative_dir": "roboharness_run/trial_001/accelerate_end_tick_0149/target_lag_3",
"selection_reason": "accelerate target pose sampled at +3 ticks from phase end",
"sim_time_secs": 3.039999999999887,
"tick": 152
},
{
"cameras": [
"track",
"side",
"top"
],
"frame_index": 153,
"frame_source": "canonical_replay_trace",
"lag_ms": 80.0,
"lag_ticks": 4,
"relative_dir": "roboharness_run/trial_001/accelerate_end_tick_0149/target_lag_4",
"selection_reason": "accelerate target pose sampled at +4 ticks from phase end",
"sim_time_secs": 3.0599999999998846,
"tick": 153
},
{
"cameras": [
"track",
"side",
"top"
],
"frame_index": 154,
"frame_source": "canonical_replay_trace",
"lag_ms": 100.0,
"lag_ticks": 5,
"relative_dir": "roboharness_run/trial_001/accelerate_end_tick_0149/target_lag_5",
"selection_reason": "accelerate target pose sampled at +5 ticks from phase end",
"sim_time_secs": 3.0799999999998824,
"tick": 154
}
],
"timeline": {
"duration_secs": 2.0,
"duration_ticks": 100,
"end_tick": 149,
"midpoint_tick": 99,
"start_tick": 50
}
}
Midpoint capture at tick 174; phase-end review anchored at tick 199.
Static tick and asset-path contract for manual debugging without driving the browser controls.
{
"actual_variants": [
{
"cameras": [
"track",
"side",
"top"
],
"frame_index": 199,
"frame_source": "canonical_replay_trace",
"lag_ms": 0.0,
"lag_ticks": 0,
"relative_dir": "roboharness_run/trial_001/turn_end_tick_0199/lag_0",
"selection_reason": "turn phase end actual response at +0 ticks",
"sim_time_secs": 3.9799999999997833,
"tick": 199
},
{
"cameras": [
"track",
"side",
"top"
],
"frame_index": 200,
"frame_source": "canonical_replay_trace",
"lag_ms": 20.0,
"lag_ticks": 1,
"relative_dir": "roboharness_run/trial_001/turn_end_tick_0199/lag_1",
"selection_reason": "turn phase end actual response at +1 ticks",
"sim_time_secs": 3.999999999999781,
"tick": 200
},
{
"cameras": [
"track",
"side",
"top"
],
"frame_index": 201,
"frame_source": "canonical_replay_trace",
"lag_ms": 40.0,
"lag_ticks": 2,
"relative_dir": "roboharness_run/trial_001/turn_end_tick_0199/lag_2",
"selection_reason": "turn phase end actual response at +2 ticks",
"sim_time_secs": 4.019999999999779,
"tick": 201
},
{
"cameras": [
"track",
"side",
"top"
],
"frame_index": 202,
"frame_source": "canonical_replay_trace",
"lag_ms": 60.0,
"lag_ticks": 3,
"relative_dir": "roboharness_run/trial_001/turn_end_tick_0199/lag_3",
"selection_reason": "turn phase end actual response at +3 ticks",
"sim_time_secs": 4.039999999999777,
"tick": 202
},
{
"cameras": [
"track",
"side",
"top"
],
"frame_index": 203,
"frame_source": "canonical_replay_trace",
"lag_ms": 80.0,
"lag_ticks": 4,
"relative_dir": "roboharness_run/trial_001/turn_end_tick_0199/lag_4",
"selection_reason": "turn phase end actual response at +4 ticks",
"sim_time_secs": 4.059999999999775,
"tick": 203
},
{
"cameras": [
"track",
"side",
"top"
],
"frame_index": 204,
"frame_source": "canonical_replay_trace",
"lag_ms": 100.0,
"lag_ticks": 5,
"relative_dir": "roboharness_run/trial_001/turn_end_tick_0199/lag_5",
"selection_reason": "turn phase end actual response at +5 ticks",
"sim_time_secs": 4.079999999999773,
"tick": 204
}
],
"default_review": {
"actual_frame_index": 202,
"actual_lag_ms": 60.0,
"actual_lag_ticks": 3,
"actual_relative_dir": "roboharness_run/trial_001/turn_end_tick_0199/lag_3",
"actual_tick": 202,
"target_frame_index": 199,
"target_lag_ms": 0.0,
"target_lag_ticks": 0,
"target_relative_dir": "roboharness_run/trial_001/turn_end_tick_0199/target_lag_0",
"target_tick": 199
},
"midpoint": {
"cameras": [
"track",
"side",
"top"
],
"frame_index": 174,
"frame_source": "canonical_replay_trace",
"lag_ms": 0.0,
"lag_ticks": 0,
"relative_dir": "roboharness_run/trial_001/turn_midpoint_tick_0174",
"selection_reason": "turn midpoint from the explicit phase timeline",
"sim_time_secs": 3.4799999999998383,
"tick": 174
},
"phase_end_anchor": {
"cameras": [
"track",
"side",
"top"
],
"frame_index": 199,
"frame_source": "canonical_replay_trace",
"lag_ms": 0.0,
"lag_ticks": 0,
"phase_end_tick": 199,
"relative_dir": "roboharness_run/trial_001/turn_end_tick_0199/lag_3",
"selection_reason": "turn phase end with positive-lag actual-response review",
"sim_time_secs": 3.9799999999997833,
"tick": 199
},
"phase_name": "turn",
"target_variants": [
{
"cameras": [
"track",
"side",
"top"
],
"frame_index": 199,
"frame_source": "canonical_replay_trace",
"lag_ms": 0.0,
"lag_ticks": 0,
"relative_dir": "roboharness_run/trial_001/turn_end_tick_0199/target_lag_0",
"selection_reason": "turn target pose sampled at +0 ticks from phase end",
"sim_time_secs": 3.9799999999997833,
"tick": 199
},
{
"cameras": [
"track",
"side",
"top"
],
"frame_index": 200,
"frame_source": "canonical_replay_trace",
"lag_ms": 20.0,
"lag_ticks": 1,
"relative_dir": "roboharness_run/trial_001/turn_end_tick_0199/target_lag_1",
"selection_reason": "turn target pose sampled at +1 ticks from phase end",
"sim_time_secs": 3.999999999999781,
"tick": 200
},
{
"cameras": [
"track",
"side",
"top"
],
"frame_index": 201,
"frame_source": "canonical_replay_trace",
"lag_ms": 40.0,
"lag_ticks": 2,
"relative_dir": "roboharness_run/trial_001/turn_end_tick_0199/target_lag_2",
"selection_reason": "turn target pose sampled at +2 ticks from phase end",
"sim_time_secs": 4.019999999999779,
"tick": 201
},
{
"cameras": [
"track",
"side",
"top"
],
"frame_index": 202,
"frame_source": "canonical_replay_trace",
"lag_ms": 60.0,
"lag_ticks": 3,
"relative_dir": "roboharness_run/trial_001/turn_end_tick_0199/target_lag_3",
"selection_reason": "turn target pose sampled at +3 ticks from phase end",
"sim_time_secs": 4.039999999999777,
"tick": 202
},
{
"cameras": [
"track",
"side",
"top"
],
"frame_index": 203,
"frame_source": "canonical_replay_trace",
"lag_ms": 80.0,
"lag_ticks": 4,
"relative_dir": "roboharness_run/trial_001/turn_end_tick_0199/target_lag_4",
"selection_reason": "turn target pose sampled at +4 ticks from phase end",
"sim_time_secs": 4.059999999999775,
"tick": 203
},
{
"cameras": [
"track",
"side",
"top"
],
"frame_index": 204,
"frame_source": "canonical_replay_trace",
"lag_ms": 100.0,
"lag_ticks": 5,
"relative_dir": "roboharness_run/trial_001/turn_end_tick_0199/target_lag_5",
"selection_reason": "turn target pose sampled at +5 ticks from phase end",
"sim_time_secs": 4.079999999999773,
"tick": 204
}
],
"timeline": {
"duration_secs": 1.0,
"duration_ticks": 50,
"end_tick": 199,
"midpoint_tick": 174,
"start_tick": 150
}
}
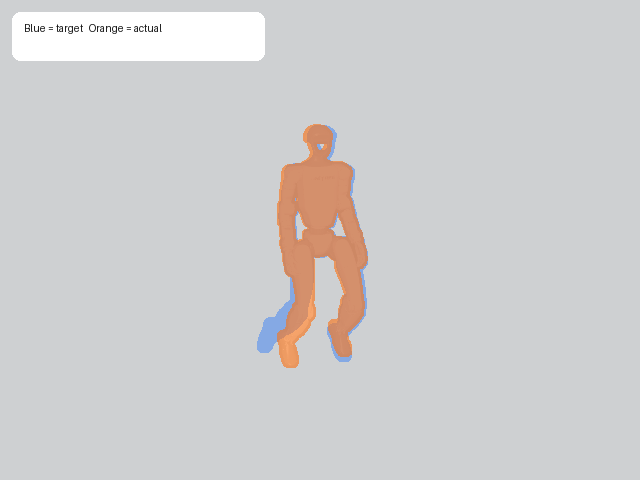
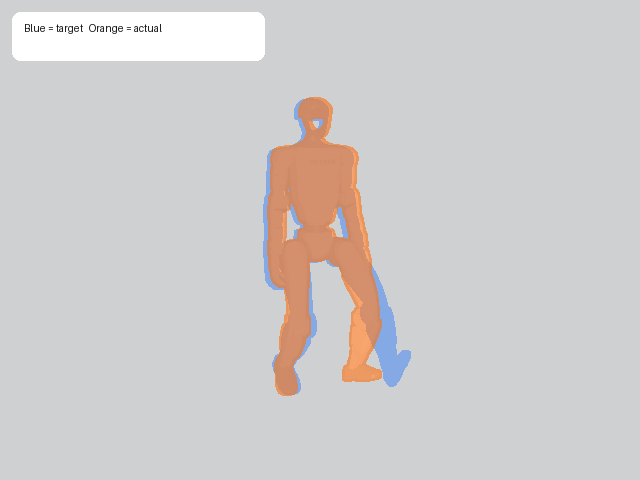
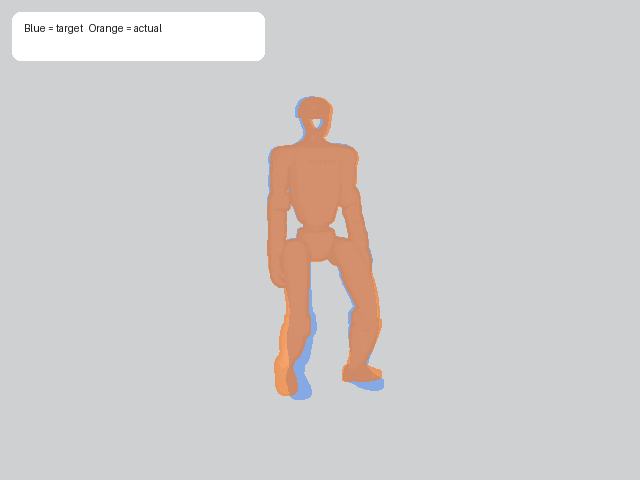
Midpoint capture at tick 274; phase-end review anchored at tick 349.
Static tick and asset-path contract for manual debugging without driving the browser controls.
{
"actual_variants": [
{
"cameras": [
"track",
"side",
"top"
],
"frame_index": 349,
"frame_source": "canonical_replay_trace",
"lag_ms": 0.0,
"lag_ticks": 0,
"relative_dir": "roboharness_run/trial_001/run_end_tick_0349/lag_0",
"selection_reason": "run phase end actual response at +0 ticks",
"sim_time_secs": 6.979999999999453,
"tick": 349
},
{
"cameras": [
"track",
"side",
"top"
],
"frame_index": 350,
"frame_source": "canonical_replay_trace",
"lag_ms": 20.0,
"lag_ticks": 1,
"relative_dir": "roboharness_run/trial_001/run_end_tick_0349/lag_1",
"selection_reason": "run phase end actual response at +1 ticks",
"sim_time_secs": 6.999999999999451,
"tick": 350
},
{
"cameras": [
"track",
"side",
"top"
],
"frame_index": 351,
"frame_source": "canonical_replay_trace",
"lag_ms": 40.0,
"lag_ticks": 2,
"relative_dir": "roboharness_run/trial_001/run_end_tick_0349/lag_2",
"selection_reason": "run phase end actual response at +2 ticks",
"sim_time_secs": 7.019999999999449,
"tick": 351
},
{
"cameras": [
"track",
"side",
"top"
],
"frame_index": 352,
"frame_source": "canonical_replay_trace",
"lag_ms": 60.0,
"lag_ticks": 3,
"relative_dir": "roboharness_run/trial_001/run_end_tick_0349/lag_3",
"selection_reason": "run phase end actual response at +3 ticks",
"sim_time_secs": 7.039999999999447,
"tick": 352
},
{
"cameras": [
"track",
"side",
"top"
],
"frame_index": 353,
"frame_source": "canonical_replay_trace",
"lag_ms": 80.0,
"lag_ticks": 4,
"relative_dir": "roboharness_run/trial_001/run_end_tick_0349/lag_4",
"selection_reason": "run phase end actual response at +4 ticks",
"sim_time_secs": 7.0599999999994445,
"tick": 353
},
{
"cameras": [
"track",
"side",
"top"
],
"frame_index": 354,
"frame_source": "canonical_replay_trace",
"lag_ms": 100.0,
"lag_ticks": 5,
"relative_dir": "roboharness_run/trial_001/run_end_tick_0349/lag_5",
"selection_reason": "run phase end actual response at +5 ticks",
"sim_time_secs": 7.079999999999442,
"tick": 354
}
],
"default_review": {
"actual_frame_index": 352,
"actual_lag_ms": 60.0,
"actual_lag_ticks": 3,
"actual_relative_dir": "roboharness_run/trial_001/run_end_tick_0349/lag_3",
"actual_tick": 352,
"target_frame_index": 349,
"target_lag_ms": 0.0,
"target_lag_ticks": 0,
"target_relative_dir": "roboharness_run/trial_001/run_end_tick_0349/target_lag_0",
"target_tick": 349
},
"midpoint": {
"cameras": [
"track",
"side",
"top"
],
"frame_index": 274,
"frame_source": "canonical_replay_trace",
"lag_ms": 0.0,
"lag_ticks": 0,
"relative_dir": "roboharness_run/trial_001/run_midpoint_tick_0274",
"selection_reason": "run midpoint from the explicit phase timeline",
"sim_time_secs": 5.4799999999996185,
"tick": 274
},
"phase_end_anchor": {
"cameras": [
"track",
"side",
"top"
],
"frame_index": 349,
"frame_source": "canonical_replay_trace",
"lag_ms": 0.0,
"lag_ticks": 0,
"phase_end_tick": 349,
"relative_dir": "roboharness_run/trial_001/run_end_tick_0349/lag_3",
"selection_reason": "run phase end with positive-lag actual-response review",
"sim_time_secs": 6.979999999999453,
"tick": 349
},
"phase_name": "run",
"target_variants": [
{
"cameras": [
"track",
"side",
"top"
],
"frame_index": 349,
"frame_source": "canonical_replay_trace",
"lag_ms": 0.0,
"lag_ticks": 0,
"relative_dir": "roboharness_run/trial_001/run_end_tick_0349/target_lag_0",
"selection_reason": "run target pose sampled at +0 ticks from phase end",
"sim_time_secs": 6.979999999999453,
"tick": 349
},
{
"cameras": [
"track",
"side",
"top"
],
"frame_index": 350,
"frame_source": "canonical_replay_trace",
"lag_ms": 20.0,
"lag_ticks": 1,
"relative_dir": "roboharness_run/trial_001/run_end_tick_0349/target_lag_1",
"selection_reason": "run target pose sampled at +1 ticks from phase end",
"sim_time_secs": 6.999999999999451,
"tick": 350
},
{
"cameras": [
"track",
"side",
"top"
],
"frame_index": 351,
"frame_source": "canonical_replay_trace",
"lag_ms": 40.0,
"lag_ticks": 2,
"relative_dir": "roboharness_run/trial_001/run_end_tick_0349/target_lag_2",
"selection_reason": "run target pose sampled at +2 ticks from phase end",
"sim_time_secs": 7.019999999999449,
"tick": 351
},
{
"cameras": [
"track",
"side",
"top"
],
"frame_index": 352,
"frame_source": "canonical_replay_trace",
"lag_ms": 60.0,
"lag_ticks": 3,
"relative_dir": "roboharness_run/trial_001/run_end_tick_0349/target_lag_3",
"selection_reason": "run target pose sampled at +3 ticks from phase end",
"sim_time_secs": 7.039999999999447,
"tick": 352
},
{
"cameras": [
"track",
"side",
"top"
],
"frame_index": 353,
"frame_source": "canonical_replay_trace",
"lag_ms": 80.0,
"lag_ticks": 4,
"relative_dir": "roboharness_run/trial_001/run_end_tick_0349/target_lag_4",
"selection_reason": "run target pose sampled at +4 ticks from phase end",
"sim_time_secs": 7.0599999999994445,
"tick": 353
},
{
"cameras": [
"track",
"side",
"top"
],
"frame_index": 354,
"frame_source": "canonical_replay_trace",
"lag_ms": 100.0,
"lag_ticks": 5,
"relative_dir": "roboharness_run/trial_001/run_end_tick_0349/target_lag_5",
"selection_reason": "run target pose sampled at +5 ticks from phase end",
"sim_time_secs": 7.079999999999442,
"tick": 354
}
],
"timeline": {
"duration_secs": 3.0,
"duration_ticks": 150,
"end_tick": 349,
"midpoint_tick": 274,
"start_tick": 200
}
}
Midpoint capture at tick 374; phase-end review anchored at tick 399.
Static tick and asset-path contract for manual debugging without driving the browser controls.
{
"actual_variants": [
{
"cameras": [
"track",
"side",
"top"
],
"frame_index": 399,
"frame_source": "canonical_replay_trace",
"lag_ms": 0.0,
"lag_ticks": 0,
"relative_dir": "roboharness_run/trial_001/settle_end_tick_0399/lag_0",
"selection_reason": "settle phase end actual response at +0 ticks",
"sim_time_secs": 7.979999999999343,
"tick": 399
},
{
"cameras": [
"track",
"side",
"top"
],
"frame_index": 400,
"frame_source": "canonical_replay_trace",
"lag_ms": 20.0,
"lag_ticks": 1,
"relative_dir": "roboharness_run/trial_001/settle_end_tick_0399/lag_1",
"selection_reason": "settle phase end actual response at +1 ticks",
"sim_time_secs": 7.999999999999341,
"tick": 400
},
{
"cameras": [
"track",
"side",
"top"
],
"frame_index": 401,
"frame_source": "canonical_replay_trace",
"lag_ms": 40.0,
"lag_ticks": 2,
"relative_dir": "roboharness_run/trial_001/settle_end_tick_0399/lag_2",
"selection_reason": "settle phase end actual response at +2 ticks",
"sim_time_secs": 8.019999999999348,
"tick": 401
},
{
"cameras": [
"track",
"side",
"top"
],
"frame_index": 402,
"frame_source": "canonical_replay_trace",
"lag_ms": 60.0,
"lag_ticks": 3,
"relative_dir": "roboharness_run/trial_001/settle_end_tick_0399/lag_3",
"selection_reason": "settle phase end actual response at +3 ticks",
"sim_time_secs": 8.039999999999354,
"tick": 402
},
{
"cameras": [
"track",
"side",
"top"
],
"frame_index": 403,
"frame_source": "canonical_replay_trace",
"lag_ms": 80.0,
"lag_ticks": 4,
"relative_dir": "roboharness_run/trial_001/settle_end_tick_0399/lag_4",
"selection_reason": "settle phase end actual response at +4 ticks",
"sim_time_secs": 8.059999999999361,
"tick": 403
},
{
"cameras": [
"track",
"side",
"top"
],
"frame_index": 404,
"frame_source": "canonical_replay_trace",
"lag_ms": 100.0,
"lag_ticks": 5,
"relative_dir": "roboharness_run/trial_001/settle_end_tick_0399/lag_5",
"selection_reason": "settle phase end actual response at +5 ticks",
"sim_time_secs": 8.079999999999368,
"tick": 404
}
],
"default_review": {
"actual_frame_index": 402,
"actual_lag_ms": 60.0,
"actual_lag_ticks": 3,
"actual_relative_dir": "roboharness_run/trial_001/settle_end_tick_0399/lag_3",
"actual_tick": 402,
"target_frame_index": 399,
"target_lag_ms": 0.0,
"target_lag_ticks": 0,
"target_relative_dir": "roboharness_run/trial_001/settle_end_tick_0399/target_lag_0",
"target_tick": 399
},
"midpoint": {
"cameras": [
"track",
"side",
"top"
],
"frame_index": 374,
"frame_source": "canonical_replay_trace",
"lag_ms": 0.0,
"lag_ticks": 0,
"relative_dir": "roboharness_run/trial_001/settle_midpoint_tick_0374",
"selection_reason": "settle midpoint from the explicit phase timeline",
"sim_time_secs": 7.479999999999398,
"tick": 374
},
"phase_end_anchor": {
"cameras": [
"track",
"side",
"top"
],
"frame_index": 399,
"frame_source": "canonical_replay_trace",
"lag_ms": 0.0,
"lag_ticks": 0,
"phase_end_tick": 399,
"relative_dir": "roboharness_run/trial_001/settle_end_tick_0399/lag_3",
"selection_reason": "settle phase end with positive-lag actual-response review",
"sim_time_secs": 7.979999999999343,
"tick": 399
},
"phase_name": "settle",
"target_variants": [
{
"cameras": [
"track",
"side",
"top"
],
"frame_index": 399,
"frame_source": "canonical_replay_trace",
"lag_ms": 0.0,
"lag_ticks": 0,
"relative_dir": "roboharness_run/trial_001/settle_end_tick_0399/target_lag_0",
"selection_reason": "settle target pose sampled at +0 ticks from phase end",
"sim_time_secs": 7.979999999999343,
"tick": 399
},
{
"cameras": [
"track",
"side",
"top"
],
"frame_index": 400,
"frame_source": "canonical_replay_trace",
"lag_ms": 20.0,
"lag_ticks": 1,
"relative_dir": "roboharness_run/trial_001/settle_end_tick_0399/target_lag_1",
"selection_reason": "settle target pose sampled at +1 ticks from phase end",
"sim_time_secs": 7.999999999999341,
"tick": 400
},
{
"cameras": [
"track",
"side",
"top"
],
"frame_index": 401,
"frame_source": "canonical_replay_trace",
"lag_ms": 40.0,
"lag_ticks": 2,
"relative_dir": "roboharness_run/trial_001/settle_end_tick_0399/target_lag_2",
"selection_reason": "settle target pose sampled at +2 ticks from phase end",
"sim_time_secs": 8.019999999999348,
"tick": 401
},
{
"cameras": [
"track",
"side",
"top"
],
"frame_index": 402,
"frame_source": "canonical_replay_trace",
"lag_ms": 60.0,
"lag_ticks": 3,
"relative_dir": "roboharness_run/trial_001/settle_end_tick_0399/target_lag_3",
"selection_reason": "settle target pose sampled at +3 ticks from phase end",
"sim_time_secs": 8.039999999999354,
"tick": 402
},
{
"cameras": [
"track",
"side",
"top"
],
"frame_index": 403,
"frame_source": "canonical_replay_trace",
"lag_ms": 80.0,
"lag_ticks": 4,
"relative_dir": "roboharness_run/trial_001/settle_end_tick_0399/target_lag_4",
"selection_reason": "settle target pose sampled at +4 ticks from phase end",
"sim_time_secs": 8.059999999999361,
"tick": 403
},
{
"cameras": [
"track",
"side",
"top"
],
"frame_index": 404,
"frame_source": "canonical_replay_trace",
"lag_ms": 100.0,
"lag_ticks": 5,
"relative_dir": "roboharness_run/trial_001/settle_end_tick_0399/target_lag_5",
"selection_reason": "settle target pose sampled at +5 ticks from phase end",
"sim_time_secs": 8.079999999999368,
"tick": 404
}
],
"timeline": {
"duration_secs": 1.0,
"duration_ticks": 50,
"end_tick": 399,
"midpoint_tick": 374,
"start_tick": 350
}
}
Generic evidence checkpoints stay available as secondary diagnostics instead of the primary story.
initial state before meaningful motion
first mean joint delta >= 0.08 rad (0.085 rad)

deterministic fallback at 25% of the replay because the evidence checkpoints collapsed to the same frame
deterministic fallback at 50% of the replay because the evidence checkpoints collapsed to the same frame
largest planar displacement from start (2.185 m)